

Real-time closed loop predictive tracking method of maneuvering target
A maneuvering target and target technology, applied in the field of closed-loop real-time adaptive processing of real-time prediction and real-time tracking, can solve the problem of not finding a tracking method, and achieve the effects of reliable prediction offset, reduced prediction error, and high control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
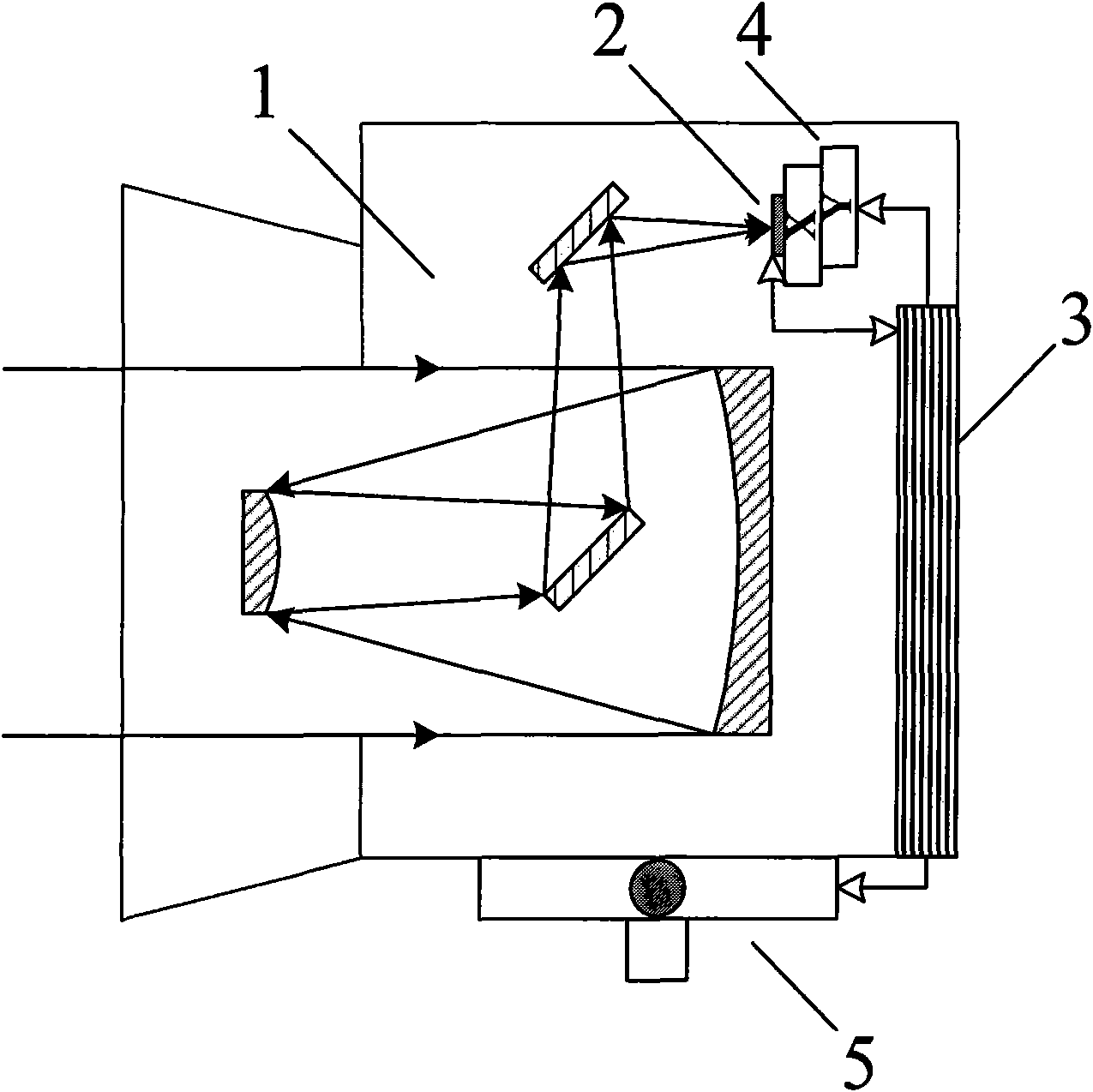
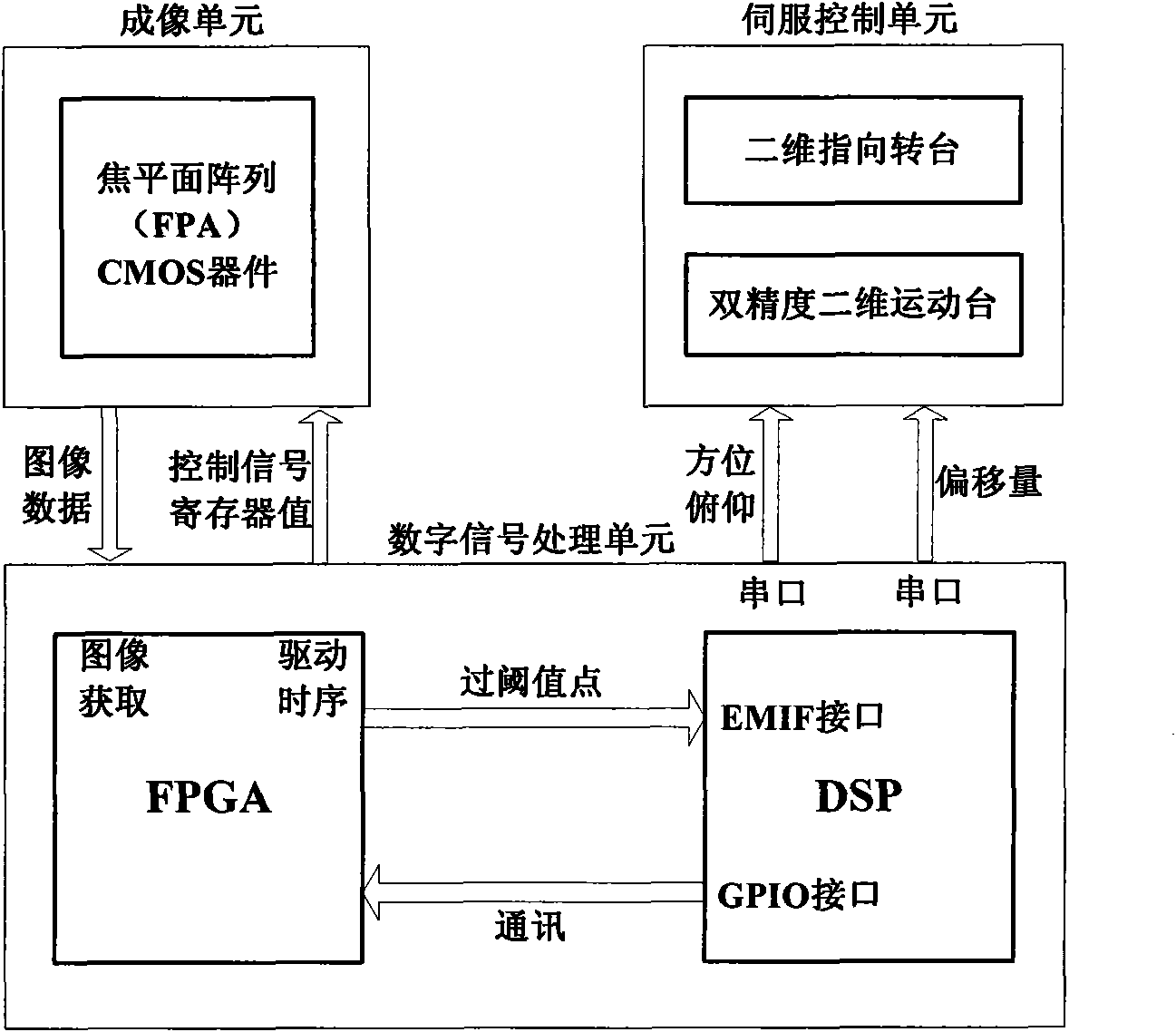
[0035] According to the real-time closed-loop predictive tracking method described in the manual, the realization of the platform such as figure 2 As shown, the platform is composed of five parts: imaging optical system 1, focal plane detector array 2, signal real-time processing and tracking servo control system 3, high-precision two-dimensional motion table 4, and overall head scanning mechanism 5. Among them: imaging optics System 1 uses an ordinary optical telescope, the main mirror diameter is 102mm, the focal length is 700mm, the F number is 7, the resolution is 1.16″, the instantaneous field of view of the system is 8urad, and the staring field of view is about 0.47°×0.6°; focal plane detector The array uses visible light area array CMOS devices with global shutter and windowing functions, the number of pixels is 1024×1280, the pixel size is 6.7um, the full-frame imaging frame rate is 27fps, and the maximum frame rate of windowed imaging 640×480 is 106fps, peak The respon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More