

Arm unit of spraying robot
A technology for spraying robots and arm parts, which is applied in the direction of claw arms, manipulators, spraying devices, etc., which can solve the problems of difficulty in ensuring the coaxiality of the transmission distance between the elbow joint and the wrist, affecting the accuracy of the spraying mechanism, and excessive load, etc., to eliminate errors , reduce the working intensity, and the effect of relative displacement compensation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
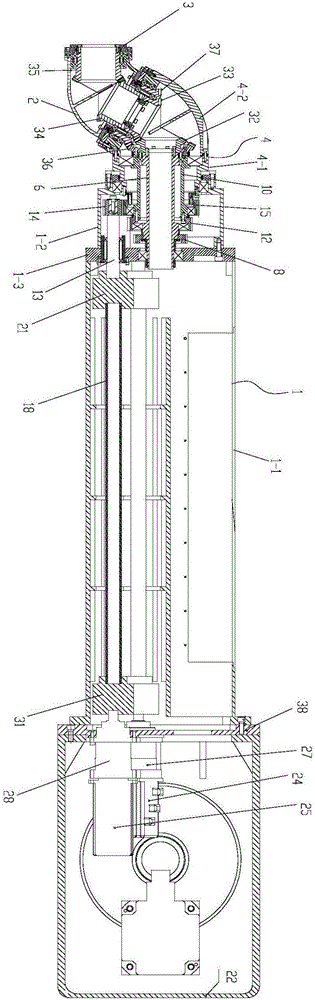
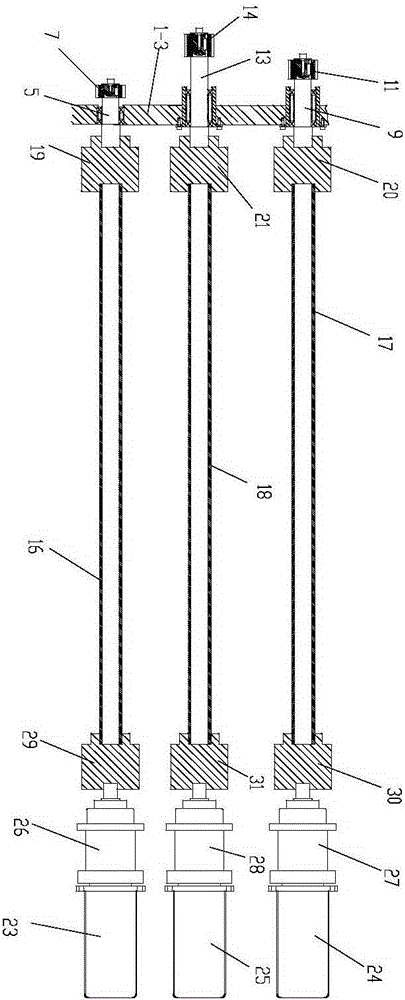
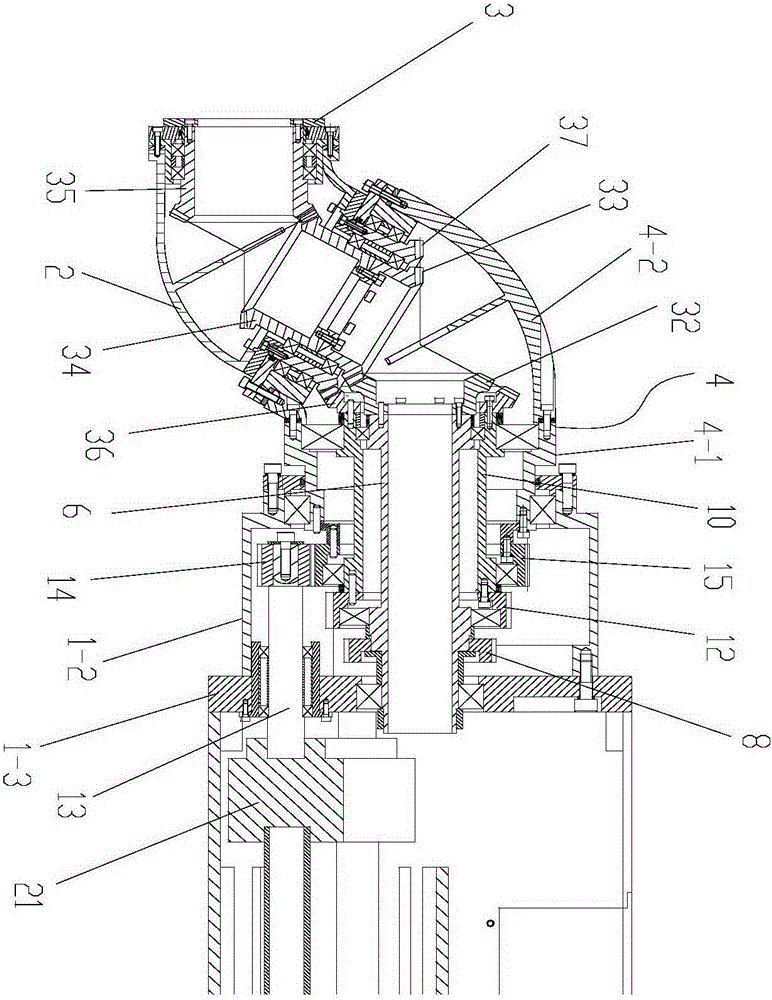
[0021] figure 1 It is a schematic diagram of the structure of the present invention. figure 2 It is a schematic diagram of the connection structure between the transmission shaft and the corresponding power input shaft in the present invention, image 3 It is an enlarged view of the wrist structure in the present invention, as shown in the figure: the spraying robot arm part of the present embodiment includes a support arm 1, a wrist 2 and a terminal arm 3 that is rotationally connected with the wrist 2, and is connected with the support arm 1 The connecting part 4, which rotates at the end and cooperates with the wrist 2, also includes a first driving mechanism for driving the terminal arm 3 to rotate, a second driving mechanism for driving the rotation of the wrist 2 and a second driving mechanism for driving the connecting part 4 to rotate. The third driving mechanism; wherein, the terminal arm 3 is used to install the final spraying mechanism, the wrist 2 is arc-shaped, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More