

Non-linear multi-unmanned-aerial-vehicle-system fault-tolerance formation control method with consideration of random disturbance
A multi-UAV, random disturbance technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as research results that have not yet appeared
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
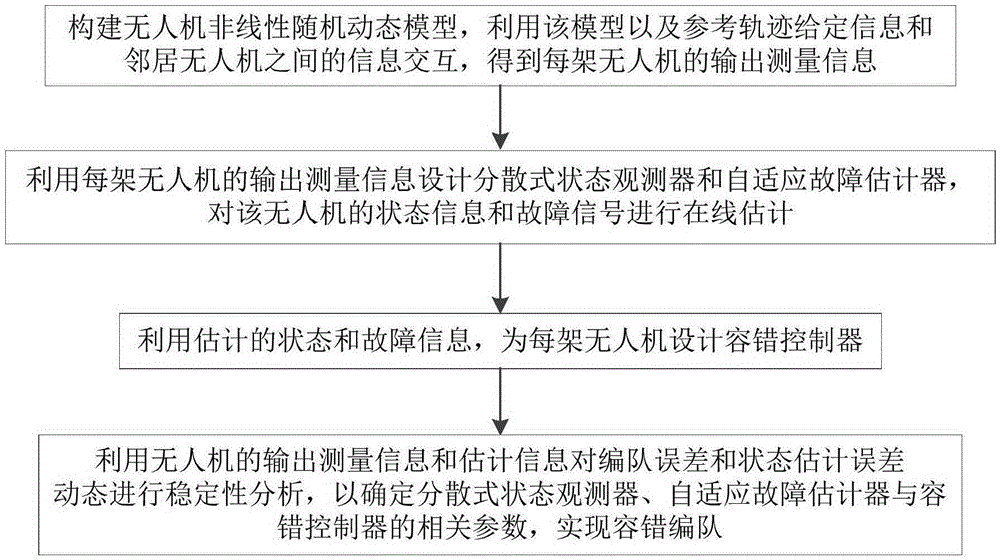
[0053] Such as figure 1 As shown, the nonlinear multi-UAV system fault-tolerant formation control method considering random disturbance includes the following steps:
[0054] a Construct a nonlinear stochastic dynamic model of the UAV, and use the model and the given information of the reference trajectory and the information interaction between neighboring UAVs to obtain the output measurement information of each UAV.
[0055] Considering the nonlinear dynamic characteristics of UAV, external disturbance, measurement noise and channel interference, the nonlinear stochastic dynamic model of the i-th UAV is constructed as follows:
[0056] x · i ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More