Dynamic model parameter identification based parallel robot control method
A dynamic model and control method technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the difficulties of dynamic model parameter identification, the limited effective working space of the end effector, and the inaccurate control accuracy of parallel robots. advanced questions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
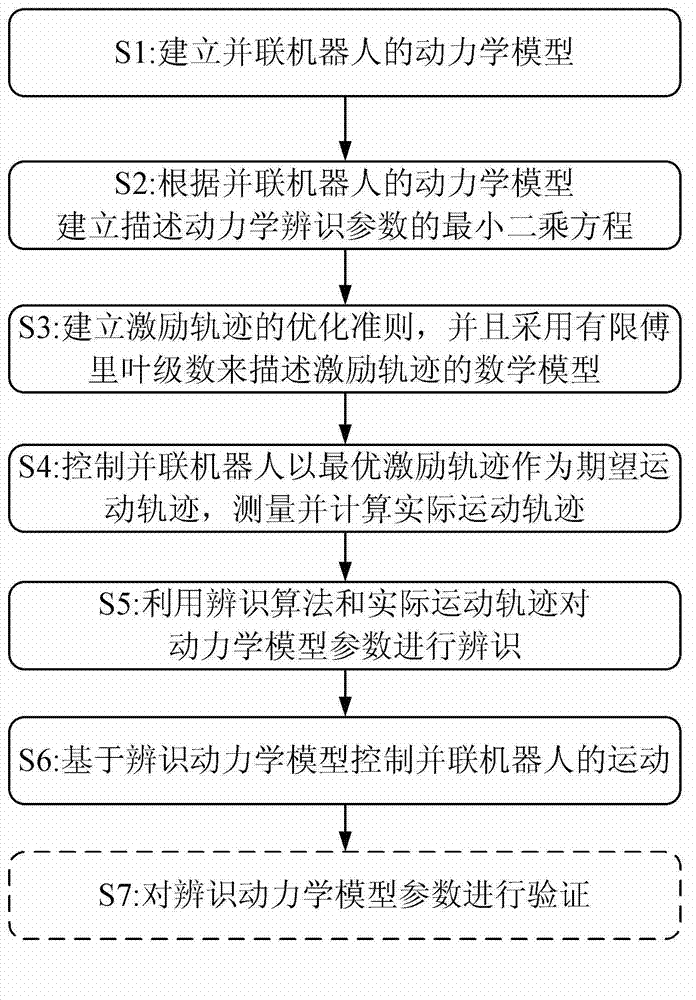
[0101] The method of the present invention is illustrated below through a specific embodiment.
[0102] In this embodiment, it is first necessary to establish a dynamics model of the parallel robot, and convert the model into a form of weighted least square equation. On the basis of the weighted least squares equation, the calculation of the optimal excitation trajectory can be based on the optimization criterion get. The variance of the moment measurements can be estimated according to equation (15) given earlier, giving and Thus the matrix Λ=diag{2.17, 1.05} is obtained. The minimum value of the optimization criterion J is obtained after 35 iterations of nonlinear optimization, and at this time, the minimum value of the optimization criterion J=-101.139 is obtained.
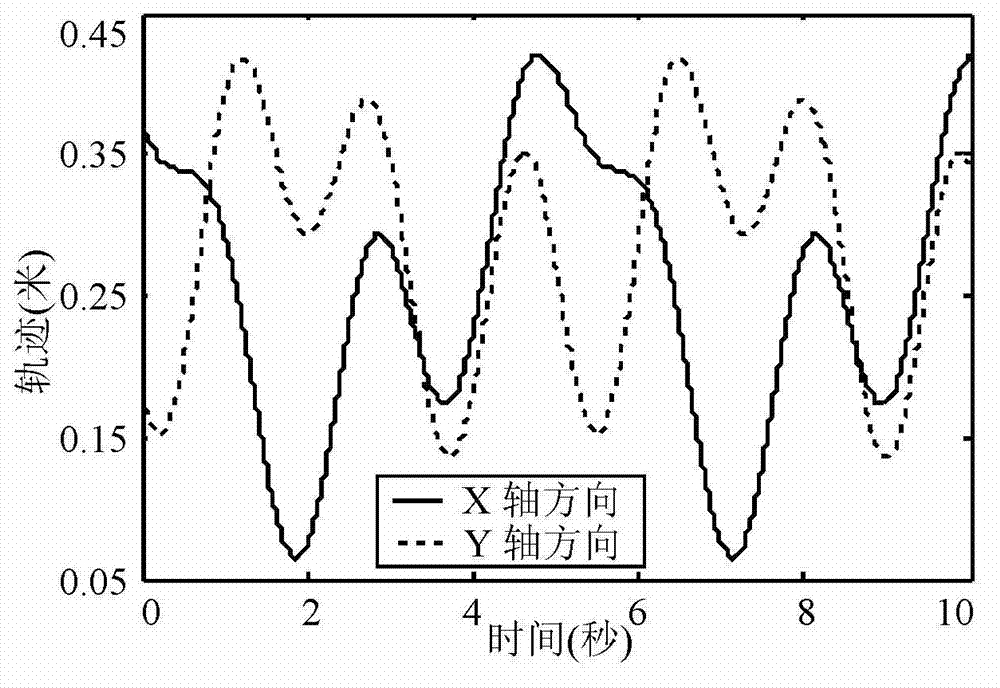
[0103] By using the optimization criterion J, the parameter optimization results of the excitation trajectory defined by equation (14) are shown in Table I, and the corresponding trajectory is called the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More