

Wheel longitudinal force regulation-based vehicle handling stability control method
A longitudinal force and vehicle technology, applied in the direction of control devices, vehicle components, driver input parameters, etc., can solve problems such as poor control effects, and achieve the effect of improving steering stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
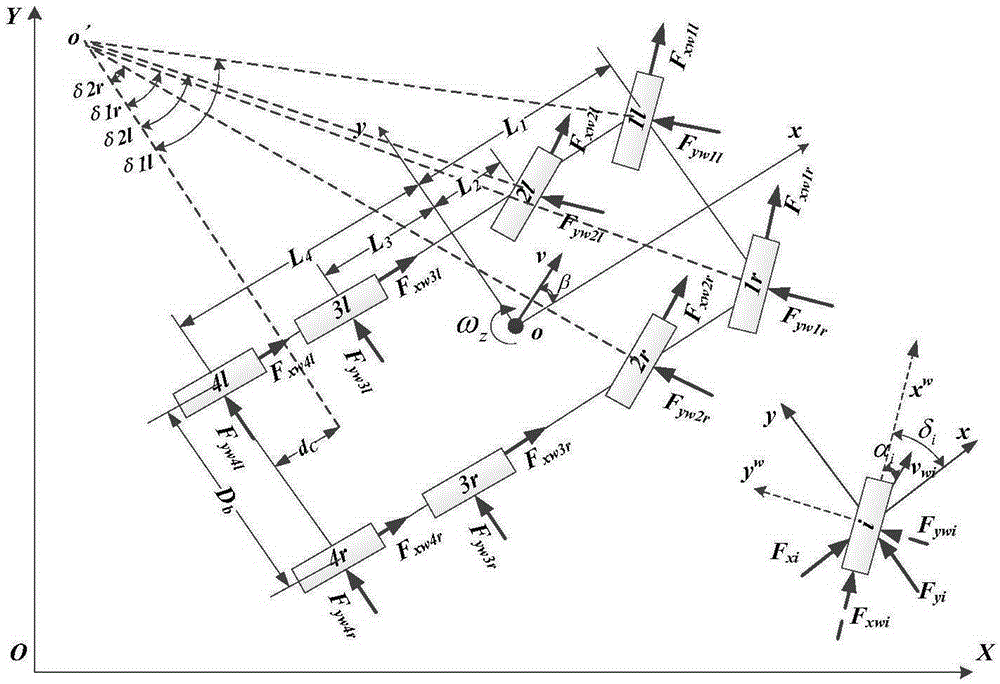
[0024] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment takes a four-axle dual-front axle steering vehicle as the control object, implements the technical solution of the present invention as a premise, and provides detailed implementation methods, but the scope of protection of the present invention is not limited to four-axle vehicles.
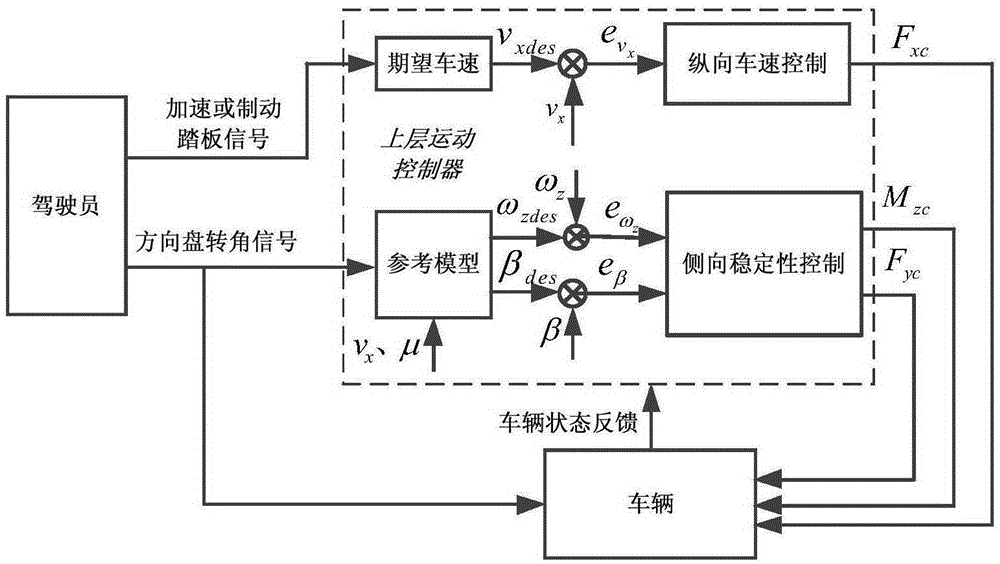
[0025] Such as figure 1 As shown, the accelerator or brake pedal signal input by the driver is resolved into the reference vehicle speed v xdes , for the rotation angle signal δ of the first axis of the vehicle 1 Input to the reference model to calculate the reference yaw rate ω zdes and the reference center-of-mass slip angle β des .
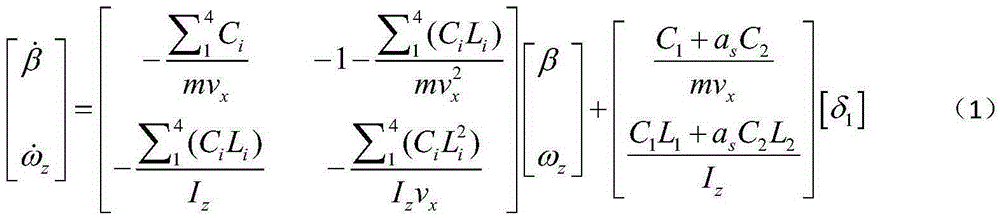
[0026] For the dual-front-axle steering four-axle vehicle in this embodiment, the reference model is a two-degree-of-freedom linear model of the vehicle, and the two-degree-of-freedom includes the two degrees of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More