

Pole-climbing robot
A technology of robots and climbing poles, applied in the field of engineering applications, can solve problems such as waste of human resources, and achieve the effects of stable operation, reasonable structure design and convenient processing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
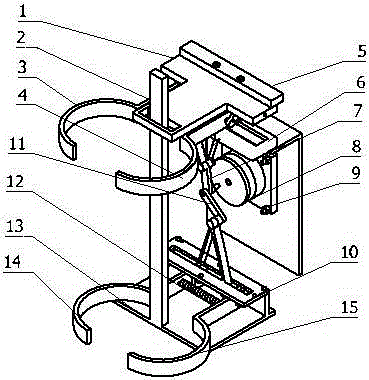
[0023] Embodiment 1: as Figure 1-6 As shown, a pole-climbing robot includes a support plate 1, a support rod 2, an upper gripper I3, an upper gripper II4, a backboard 5, an upper slider seat 6, a short connecting rod 7, a turntable 8, a motor 9, a lower Slider seat 10, long connecting rod 11, spring Ⅰ12, base 13, lower gripper Ⅰ14, lower gripper Ⅱ15, upper slider Ⅰ16, spring Ⅱ17, upper connecting rod Ⅰ18, upper slider Ⅱ19, upper connecting rod Ⅱ20, lower Connecting rod I21, lower slider I22, lower connecting rod II23, lower slider II24;
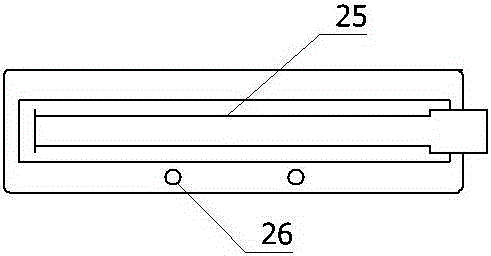
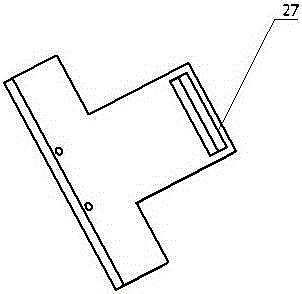
[0024] The support plate 1 is connected to the back plate 5 through the hole III28 on the back plate 5, the support rod 2 is matched with the support plate 1 through the hole II27 at the front end of the support plate 1, one end of the support rod 2 passes through the hole II27, and the other end of the support rod 2 Connected with the base 13, the slider seat is divided into an upper slider seat 6 and a lower slider seat 10. The upper slid...
Embodiment 2
[0028] Embodiment 2: as Figure 1-6 As shown, a pole-climbing robot includes a support plate 1, a support rod 2, an upper gripper I3, an upper gripper II4, a back plate 5, an upper slider seat 6, a short connecting rod 7, a turntable 8, a motor 9, a lower Slider seat 10, long connecting rod 11, spring I12, base 13, lower clamping hand I14, lower clamping hand II15, upper sliding block I16, spring II17, upper connecting rod I18, upper sliding block II19, upper connecting rod II20, lower Connecting rod I21, lower slider I22, lower connecting rod II23, lower slider II24;
[0029]The support plate 1 is connected to the back plate 5 through the hole III28 on the back plate 5, the support rod 2 is matched with the support plate 1 through the hole II27 at the front end of the support plate 1, one end of the support rod 2 passes through the hole II27, and the other end of the support rod 2 Connected with the base 13, the slider seat is divided into an upper slider seat 6 and a lower ...
Embodiment 3
[0032] Embodiment 3: as Figure 1-6 As shown, a pole-climbing robot includes a support plate 1, a support rod 2, an upper gripper I3, an upper gripper II4, a backboard 5, an upper slider seat 6, a short connecting rod 7, a turntable 8, a motor 9, a lower Slider seat 10, long connecting rod 11, spring Ⅰ12, base 13, lower gripper Ⅰ14, lower gripper Ⅱ15, upper slider Ⅰ16, spring Ⅱ17, upper connecting rod Ⅰ18, upper slider Ⅱ19, upper connecting rod Ⅱ20, lower Connecting rod I21, lower slider I22, lower connecting rod II23, lower slider II24;
[0033] The support plate 1 is connected to the back plate 5 through the hole III28 on the back plate 5, the support rod 2 is matched with the support plate 1 through the hole II27 at the front end of the support plate 1, one end of the support rod 2 passes through the hole II27, and the other end of the support rod 2 Connected with the base 13, the slider seat is divided into an upper slider seat 6 and a lower slider seat 10. The upper slid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More