

Lane line data processing method and lane line data processing device
A processing method and technology of lane lines, applied in image data processing, instruments, biological neural network models, etc., can solve problems such as low efficiency, high labor cost, distortion and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
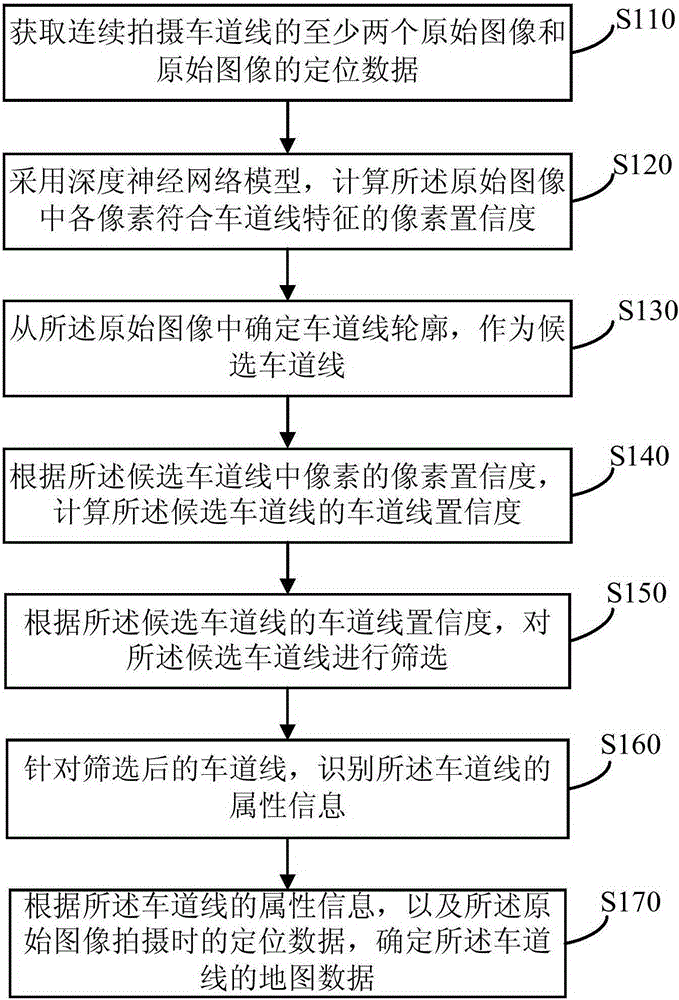
[0028] figure 1 It is a schematic flowchart of a processing method for lane line data provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of large-scale production of high-precision maps. The method can be executed by a processing device based on lane line data. The device It can be implemented in the form of hardware and / or software.
[0029] The method is as follows:
[0030] S110. Acquire at least two original images of lane markings taken continuously and positioning data of the original images.
[0031] In the above-mentioned operation, it can be specifically, by setting an industrial camera on the vehicle, performing continuous shooting at 8-10 frames per second, and collecting the lane line image of the target road section as the original image; Positioning, internal reference data such as the installation height of the industrial camera on the vehicle, shooting angle of view, and shooting posture are known, so the positio...
Embodiment 2
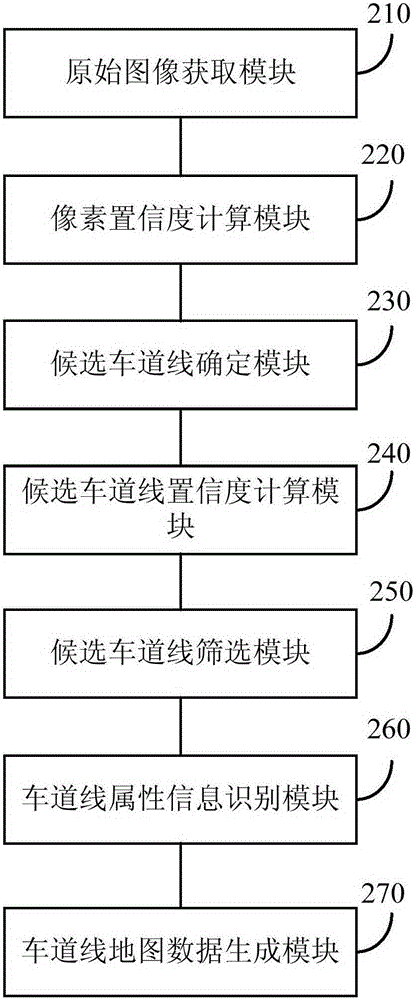
[0074] image 3 Shown is a schematic structural diagram of a device for processing lane line data provided by Embodiment 2 of the present invention, as shown in image 3 As shown, the device specifically includes: an original image acquisition module 210, a pixel confidence degree calculation module 220, a candidate lane line determination module 230, a candidate lane line confidence degree calculation module 240, a candidate lane line screening module 250, and a lane line attribute information identification module 260 and lane line map data generation module 270.
[0075] Among them, the original image acquisition module 210 is used to acquire at least two original images of the continuous shooting lane lines and the positioning data of the original images; the pixel confidence calculation module 220 is used to calculate each of the original images by using a deep neural network model. The pixel conforms to the pixel confidence of the lane line feature; the candidate lane l...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
| Width | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More