Rice transplanter
The technology of a rice transplanter and a rack is applied in the agricultural field to achieve the effects of simplifying the transmission structure, accelerating the falling speed and avoiding the dragging of seedlings.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
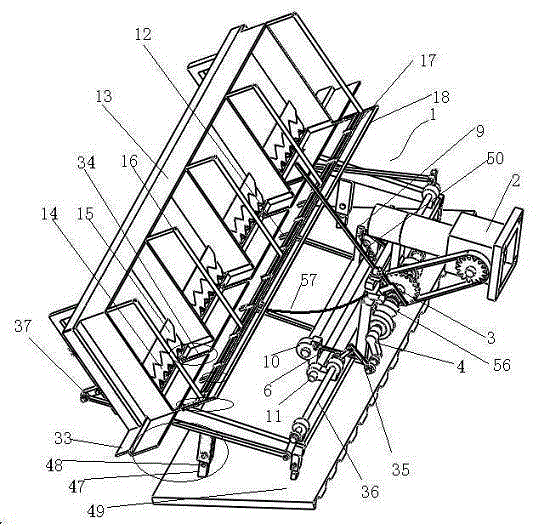
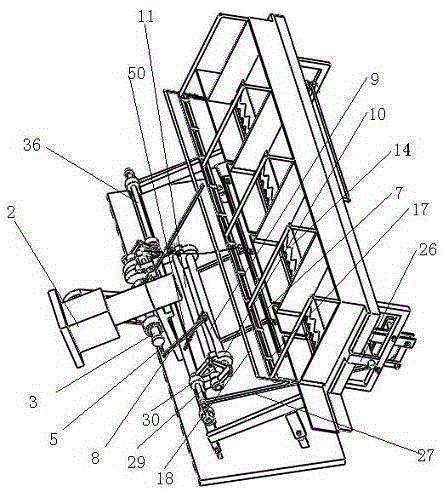
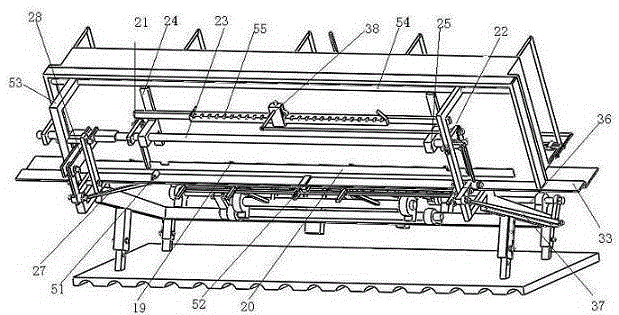
[0032] Such as Figure 1~Figure 7 A rice transplanter shown includes a frame 1, a power input box 2 is provided on the frame 1, and the power input box 2 is connected to a rotating shaft 3 in a chain drive. A rod A4, a rocker B5, the rocker A4 is connected to one side of the seedling pawl frame 7 through a connecting rod E6, and the rocker B5 is connected to the vertical rod 9 on the seedling pawl frame 7 through a connecting rod F8. Bearing seats 10 are installed at both ends. The bearing seats 10 are fixed on the drive shaft B11 on the frame 1, and the seedling claw frame 7 is provided with a seedling claw 12, and the rotating shaft 3 drives the seedling claw 11 from The seedling box 13 is grabbed and inserted into the soil. The seedling box 13 reciprocates along the track 33 on the frame 1. The track 33 is provided with a seedling opening 34, and the seedling box 13 is provided with a reciprocating movement. The seedling box 13 is provided with a layer of seedling blocking ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More