

Vehicle mileage calculation method based on double-eye vision
A binocular vision and computing technology, applied in the field of autonomous navigation of intelligent transportation vehicles, can solve problems such as difficulty in meeting real-time performance, and achieve the effect of providing vehicle navigation and positioning information, improving accuracy, and ensuring computing speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The embodiments will be described in detail below in conjunction with the accompanying drawings.
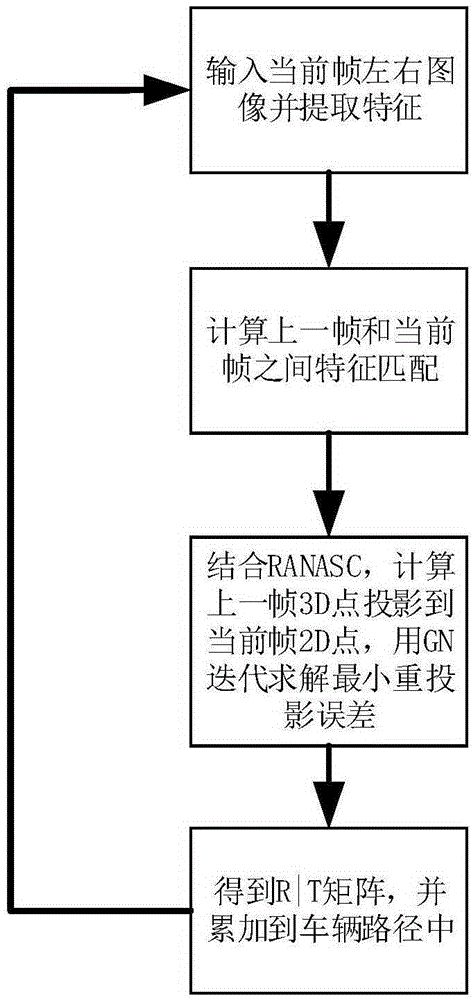
[0016] The purpose of the present invention is to realize a visual mileage calculation method for practical application in the field of intelligent transportation, and use a vehicle-mounted binocular camera to realize the needs of vehicle navigation and positioning. The odometer combines the characteristics of fast HARRIS feature calculation and accurate SURF feature calculation. It can provide accurate real-time mileage information in complex urban traffic, building occlusion, etc., to achieve the purpose of accurate positioning, and make up for the shortcomings of the positioning method purely due to GPS. Such as figure 1 As shown, the present invention includes:
[0017] Step 1: Use a binocular camera fixed on the top of the vehicle to collect binocular image data in real time at a frame rate of 10-30fps, and transmit it to the on-board processor through USB or Etherne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More