Unmanned reconnaissance aerial vehicle synchronous positioning and picture compositing method based on self-adaption EKF
An unmanned reconnaissance aircraft and synchronous positioning technology, applied in the field of unmanned aerial vehicles, can solve problems such as poor concealment, accumulated position errors, and difficulty in initial alignment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0198] The present embodiment provides a method for synchronous positioning and composition of unmanned reconnaissance aircraft based on adaptive EKF, including the following steps:
[0199] (1) Map model establishment;
[0200] (2) Coordinate system establishment;
[0201] (3) Feature model establishment;
[0202] (4) Establishment of motion model of unmanned reconnaissance aircraft;
[0203] (5) Sensor measurement model;
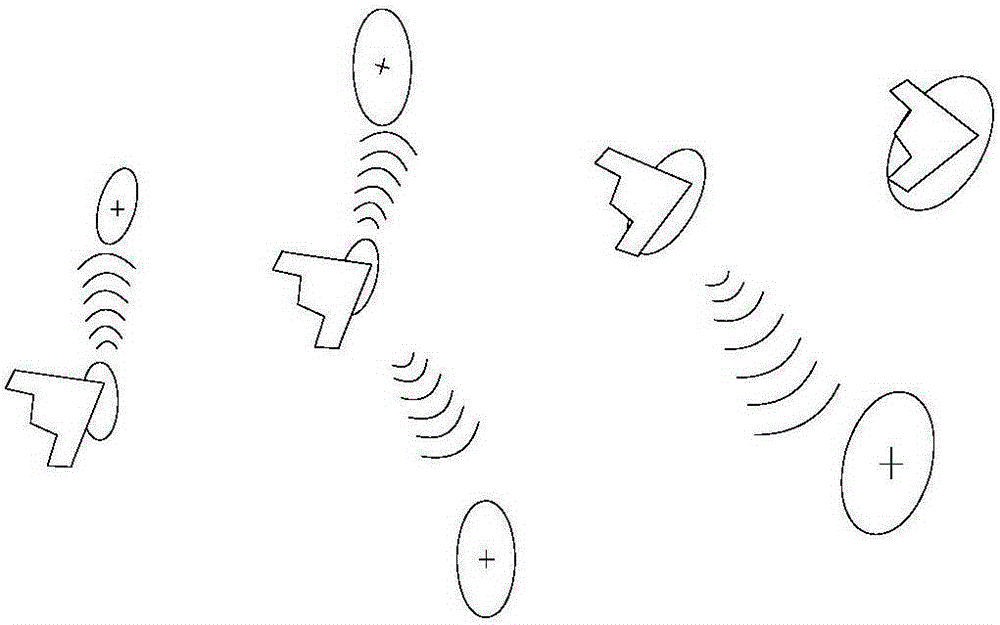
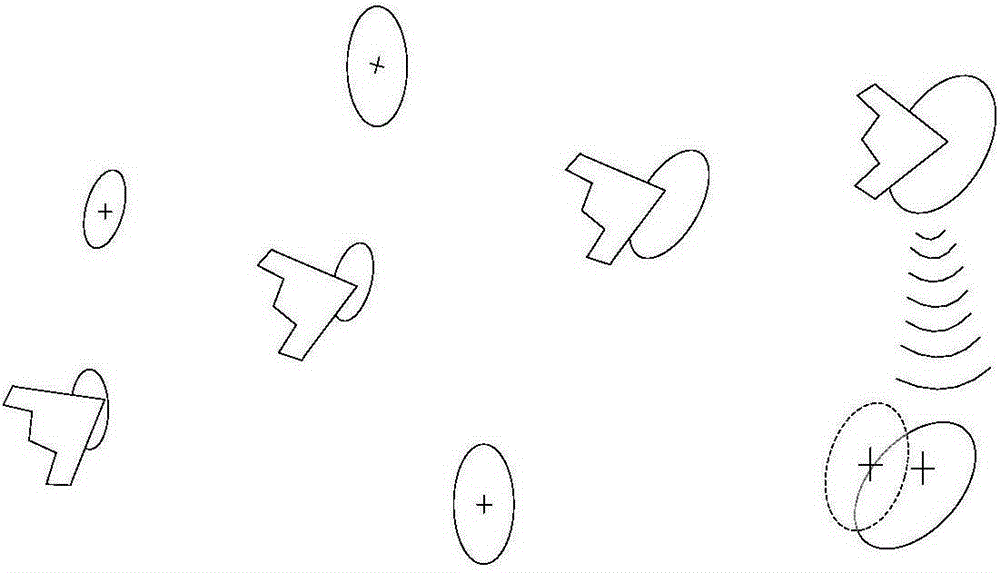
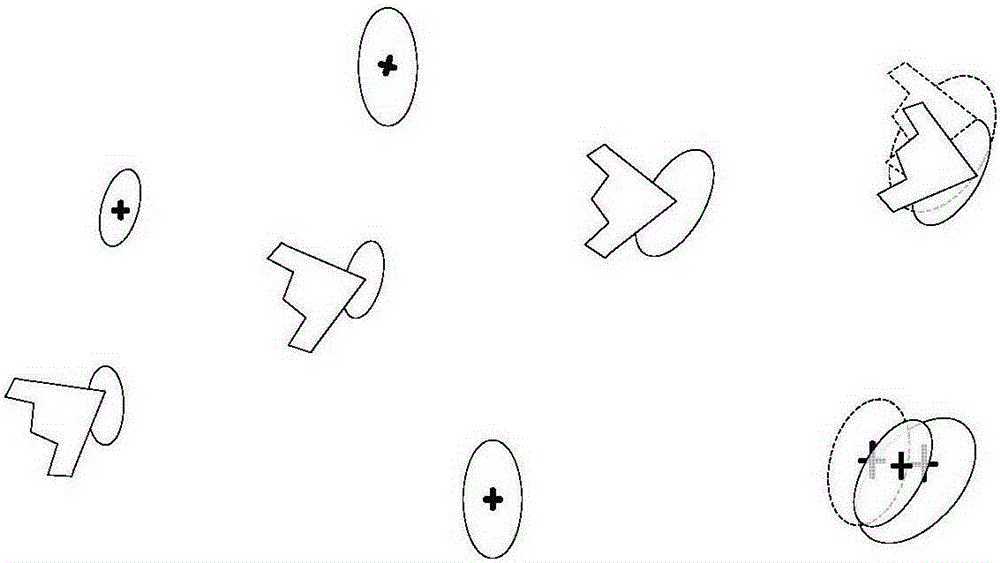
[0204] (6) Extracting the features in the image acquired by the environment perception sensor;
[0205] (7) Complete the data association process between the new observation features and the existing features in the map;
[0206] (8) Complete the integration map of new features. Or use the observed features to correct the position of the unmanned reconnaissance drone and the existing feature positions in the map.
[0207] Among them, the SLAM system model and observation model of the unmanned reconnaissance aircraft constructed are inaccurate, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More