Autonomous landing visual positioning method and system for unmanned aerial vehicle
A visual positioning and autonomous landing technology, applied in the field of unmanned aerial vehicles, can solve problems such as difficulty in achieving cm-level landing accuracy, large vertical positioning accuracy error, and poor aircraft landing accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with the accompanying drawings.
[0027] refer to Figure 1 to Figure 5 , in order to solve the problem of high-precision landing positioning of vertical take-off and landing aircraft, especially vertical take-off and landing unmanned aerial vehicles, the present invention provides an image recognition positioning method to enable the aircraft to achieve cm-level high-precision automatic landing. The technical method adopted in the present invention is: a kind of unmanned aerial vehicle autonomous landing visual positioning method, comprises the following steps:
[0028] 1) Use the GPS positioning system to determine the target azimuth range;
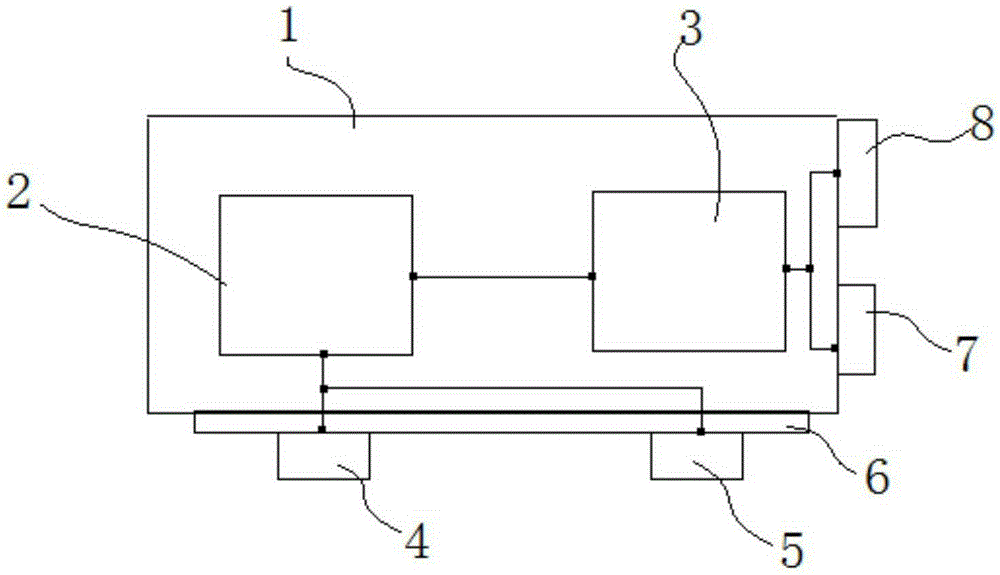
[0029] 2) After calibrating the camera parameters and pose, take pictures with the first camera 4. Step 1) Determine the mark pattern outside the target orientation range, and transfer the captured mark pattern to the embedded image computer 2 through the USB...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More