

A combined four-dimensional force and torque sensor based on structural decoupling
A torque sensor and combined technology, applied in the field of sensors, can solve the problems of inability to overcome the coupling between six-dimensional force and torque sensors, the number of patches and bridge circuits, the waste of hardware resources, etc., and achieve small errors and small size. , the effect of high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
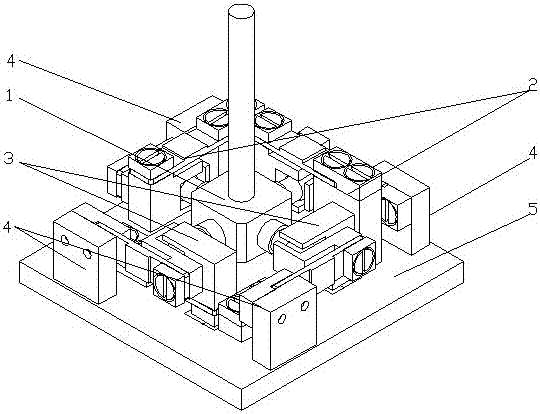
[0023] Such as figure 1 As shown, a combined four-dimensional force and moment sensor based on structural decoupling includes a floating force guide module 1, a first one-dimensional force sensor module 2, a second one-dimensional force sensor module 3, and a third one-dimensional force sensor module 4 and the base module 5; the first one-dimensional force sensor module 2 and the third one-dimensional force sensor module 4 are combined into one group and installed on the front side of the base module 5, and the other group of the first one-dimensional force sensor module 2 and the third one-dimensional force sensor module 4 are combined and installed on the left side of the base module 5; the second one-dimensional force sensor module 3 and the third one-dimensional force sensor module 4 are combined into a group and installed on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More