

A control system and method for swarm robots based on visual positioning
A swarm robot, visual positioning technology, applied in control/adjustment systems, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problems of low accuracy, poor real-time performance, and difficult application, etc. Achieve the effect of improving operating efficiency, improving operating accuracy, and reducing execution complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
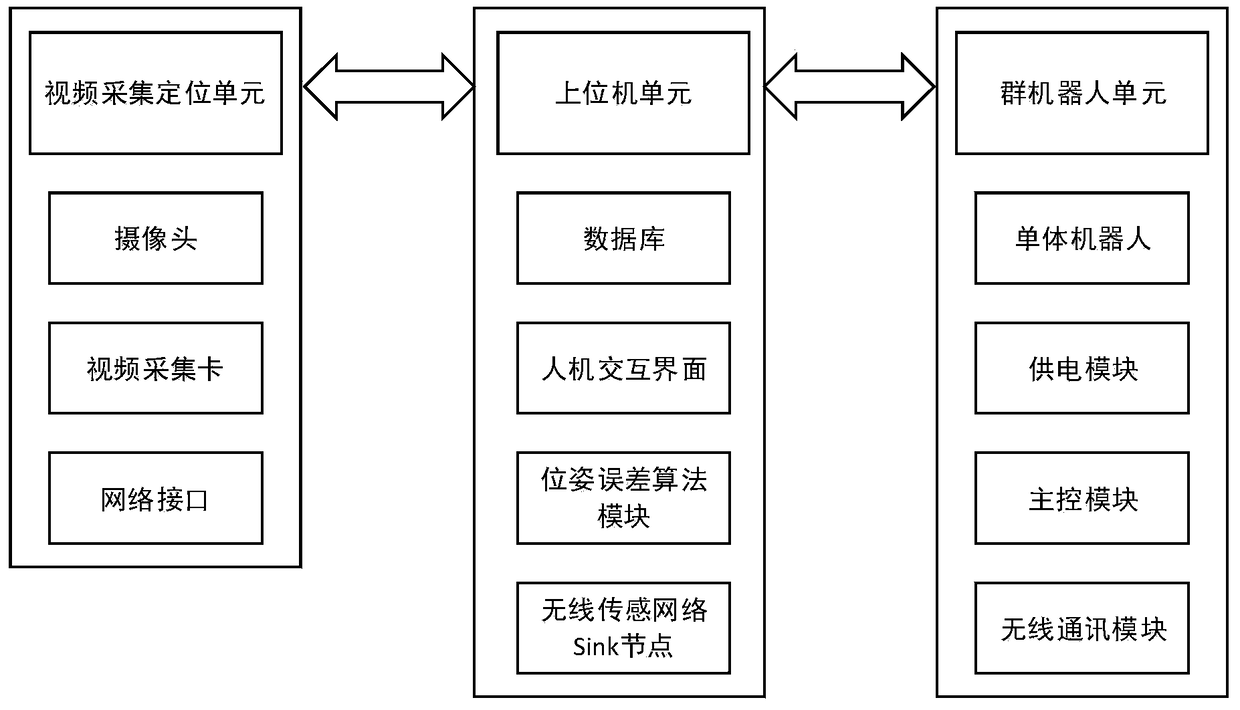
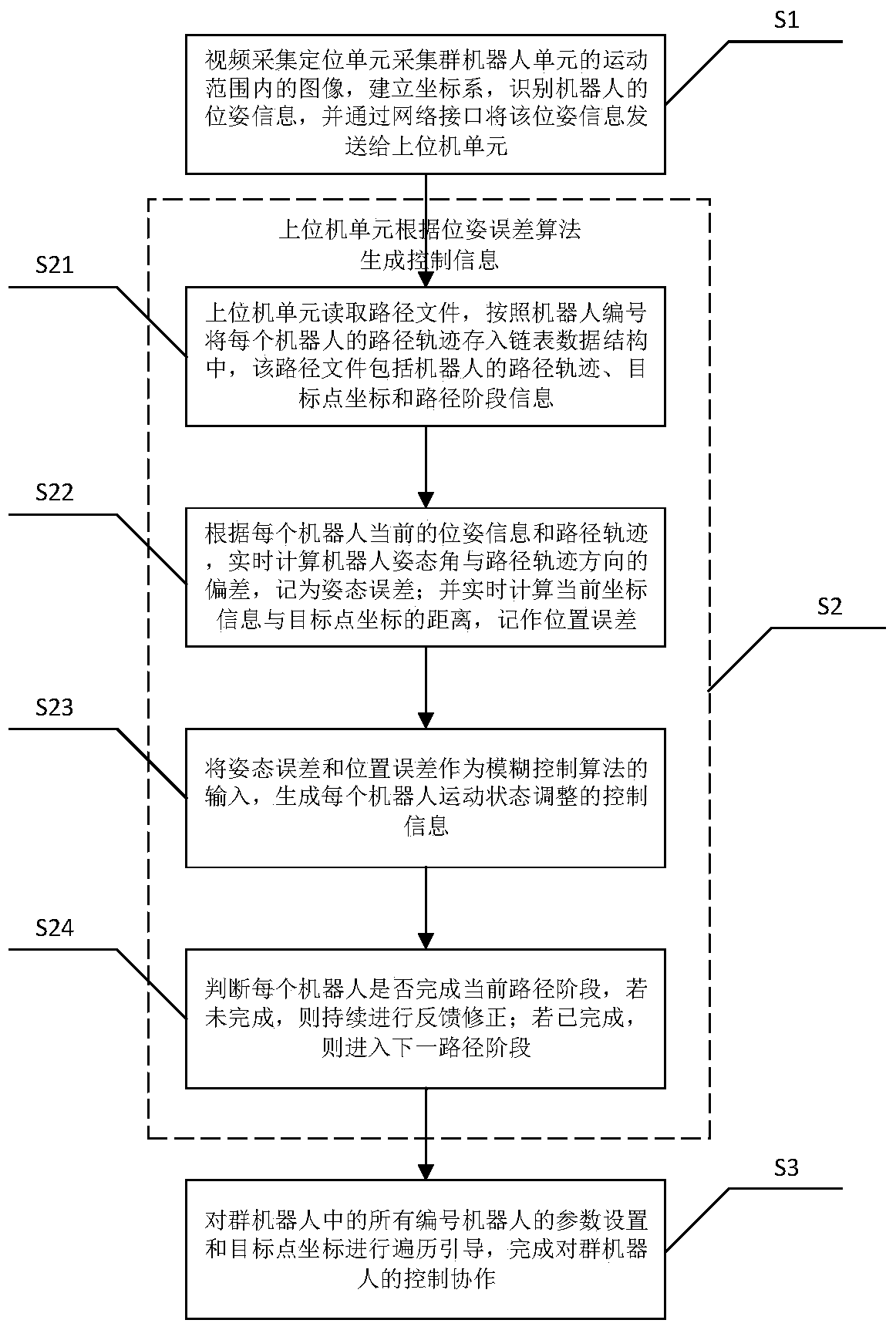
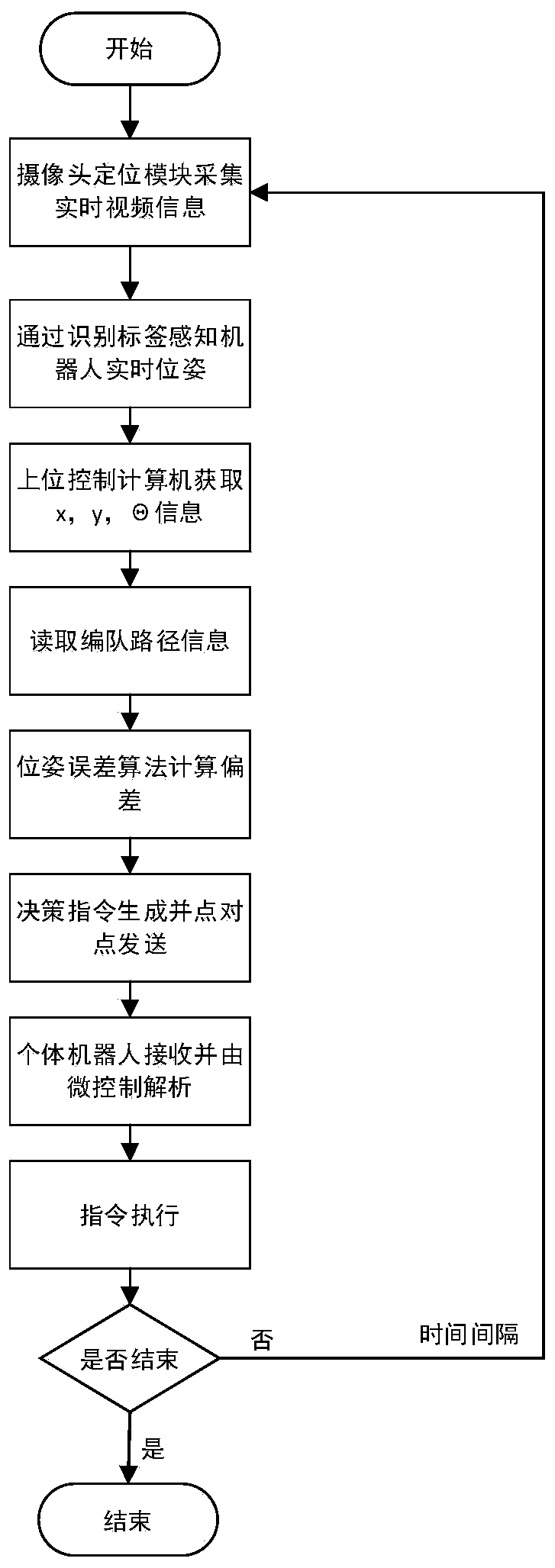
[0054] Such as figure 1 As shown, the visual positioning-based group robot control system of the embodiment of the present invention includes a video acquisition and positioning unit, a host computer unit and a group robot unit;
[0055]The video acquisition and positioning unit is used to collect images within the movement range of the group robot unit, establish a coordinate system according to the movement range, identify the pose information of each robot in the group robot unit, including the coordinate information and attitude angle information of the robot, and pass The network interface se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More