Distributed control method capable of improving control precision of flexible spacecraft
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A flexible spacecraft and distributed control technology, applied in attitude control, space navigation equipment, space navigation aircraft, etc., can solve the problem of less research
Inactive Publication Date: 2016-03-30
BEIJING INSTITUTE OF TECHNOLOGYGY +1
View PDF7 Cites 15 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0005] It should be pointed out that there are relatively few studies on the distributed control of flexible spacecraft and the application of CMGs equiangular momentum exchange devices in the field of flexible spacecraft control, and many advanced control algorithms have not yet been applied.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0053] Embodiment 1 Design of Distributed Vibration Controller Based on Lyapunov Theory
[0054] The working process and working principle of the present invention will be further explained by taking a distributed control flexible space manipulator as an example:
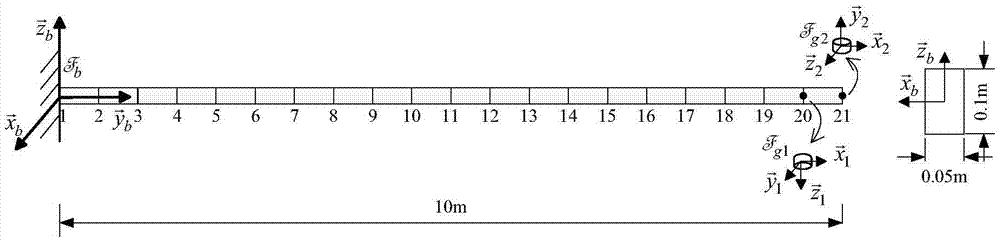
[0055] Such as image 3 As shown, the left side of the flexible space manipulator is fixedly connected to a large spacecraft. The mass of the arm is 50kg, and the inertia is diag[1668.6,10,1668.6]kg m 2 , the fundamental frequency is 0.025Hz, the structural damping is 0.005, the initial values of the first four modal coordinates are [5,5,-1,-1], and the initial values of the other modal coordinates and modal velocity are zero. When there is no control effect, the first four modes of the system oscillate between ±5, and the system vibration is in a divergent state.
[0056] Select nodes 20 and 21 to install CMGs and angular velocity meters. The selected small CMGs have a height of 80mm and a bottom diameter o...
Embodiment 2
[0072] Embodiment 2 combines Lyapunov theory and direct adaptive distributed vibration controller design
[0073]The working process and working principle of the present invention will be further explained by taking a distributed control flexible space manipulator as an example:
[0074] The structure, size, and selected CMG parameters and installation methods of the flexible space manipulator used in this embodiment are the same as those in Embodiment 1, such as image 3 As shown, the fundamental frequency is selected as 0.051Hz, and the structural damping is 0.001. The boom has static deformation at the initial moment, and the initial values of the first four modal coordinates are [1,1,-0.1,-0.1], and the remaining modes The initial values of modal coordinates and modal velocities are zero. When there is no control effect, the first four modal coordinates oscillate between ±1, and the system vibration is in a divergent state. The response of the structure under the act...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
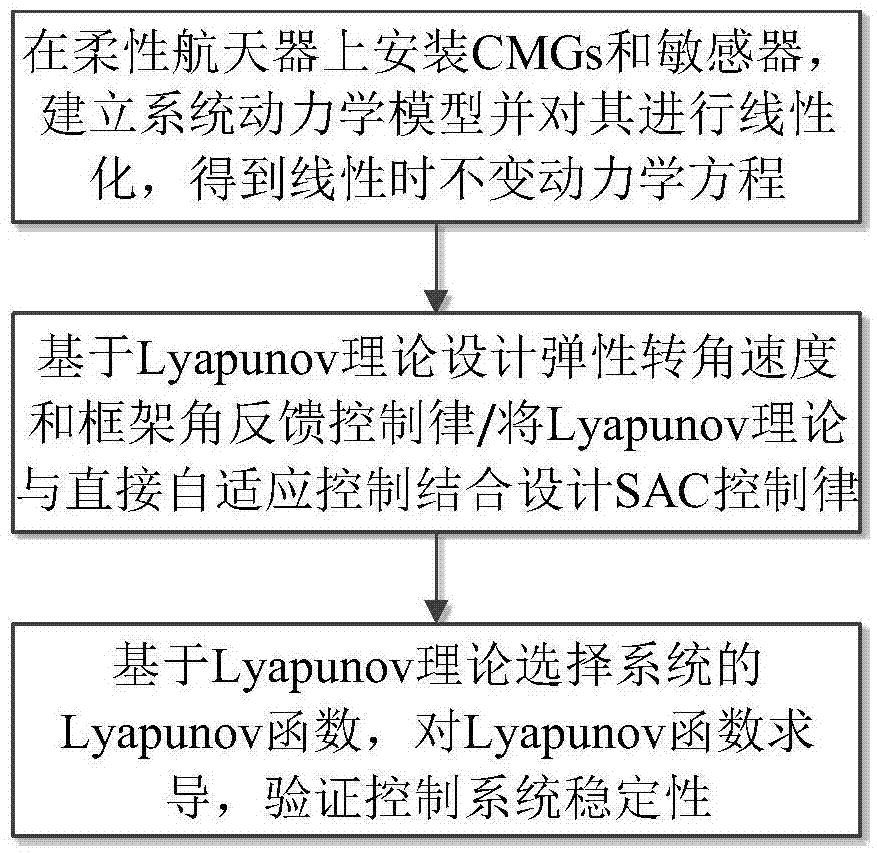
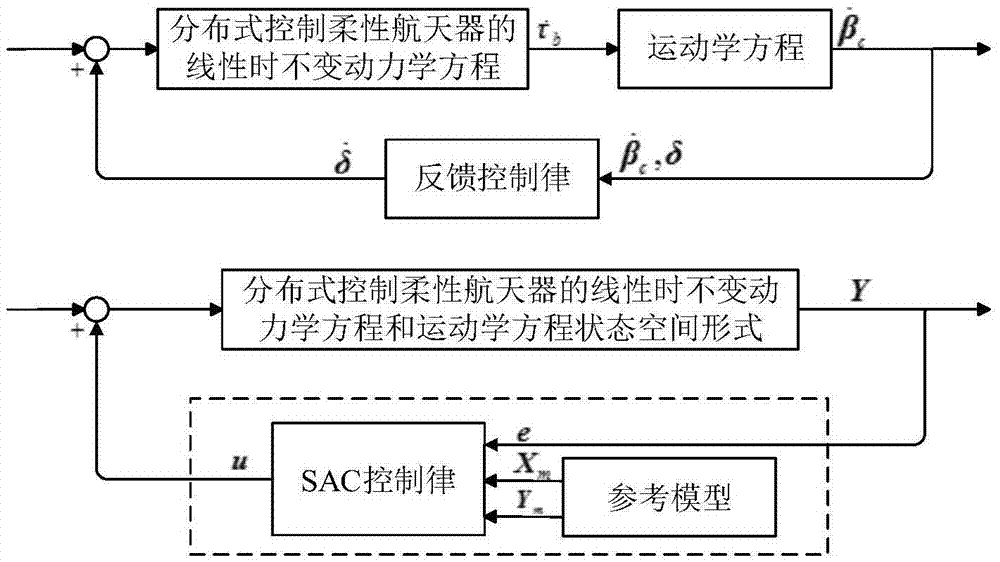
The invention relates to a distributed control method capable of improving the control precision of a flexible spacecraft and belongs to the flexible spacecraft control field. The method includes the following steps that: an execution mechanism and a sensor are installed at the same site of each of n arbitrary positions on the flexible spacecraft, and a dynamic model is established and is linearized, so that a linear time-invariant dynamic equation and a kinematics equation of a system can be obtained and are adopted as a controller design model; and an elastic rotation angle velocity and CMGs frame angle feedback control law is designed based on the Lyapunov theory, or the Lyapunov theory and direct adaptive control are combined together so as to design a desired reference model and a direct adaptive feedback control law. According to the distributed control method of the invention adopted, the vibration suppression of the flexible spacecraft can be realized based on the execution mechanisms which are installed in a distributed manner, and therefore, the vibration of the system can be converted into a stable state from a divergence state, and the control precision of the flexible spacecraft can be improved; and the estimation of the parameters of the system is not required in direct adaptive controller design, and high robustness can be realized, and therefore, the control precision of the flexible spacecraft can be further improved.
Description
technical field [0001] The invention relates to a distributed control method for improving the control precision of a flexible spacecraft, in particular to a control moment gyroscope equiangular momentum exchange device distributed and installed as an actuator, which can effectively suppress flexible vibration control in the process of attitude maneuvering The method belongs to the field of flexible spacecraft control. Background technique [0002] Distributed control of flexible structures refers to the use of angular momentum exchange devices discretely distributed on flexible structures, such as flywheels (FlyWheels, FWs) and control moment gyroscopes (ControlMomentGyroscopes, CMGs), etc., as actuators to control flexible systems. When such angular momentum devices are installed on the flexible structure, many different dynamic characteristics will be displayed, and the control problem will be greatly changed due to the introduction of new degrees of freedom. Therefore, t...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More