

Path Planning Method for Warehousing Robot Based on Linear Sequential Logic Theory
A technology of linear sequential logic and path planning, applied in the directions of instruments, motor vehicles, two-dimensional position/channel control, etc., can solve the problems of occupying computing time and memory space, low efficiency of genetic algorithm, etc., to reduce planning time, guarantee Optimal and adaptable effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following is a further description of the storage robot path planning method based on the linear sequential logic theory in the present invention through simple examples in conjunction with the accompanying drawings.
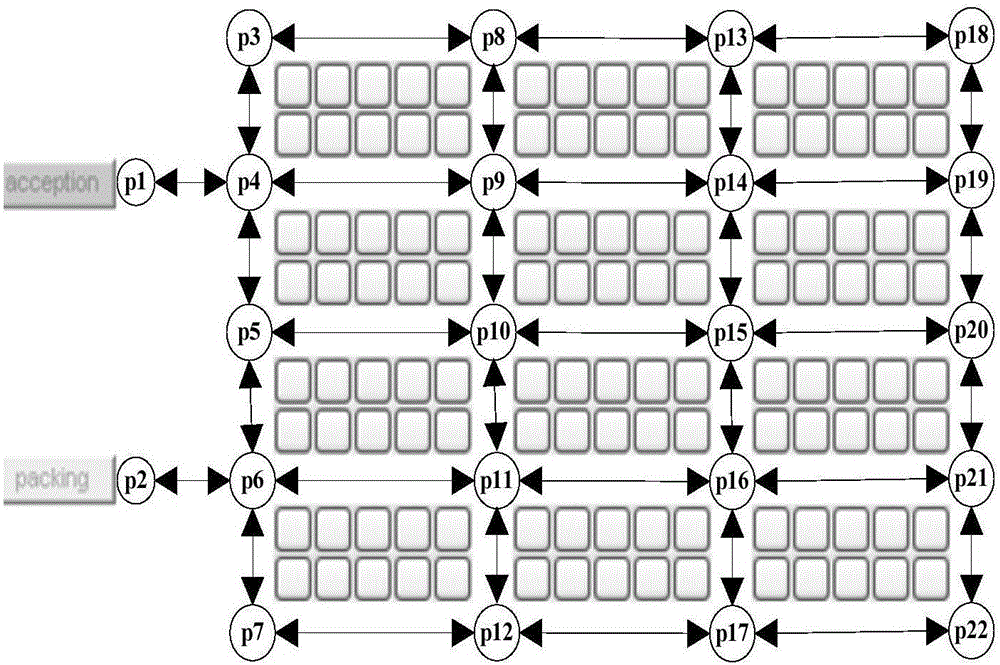
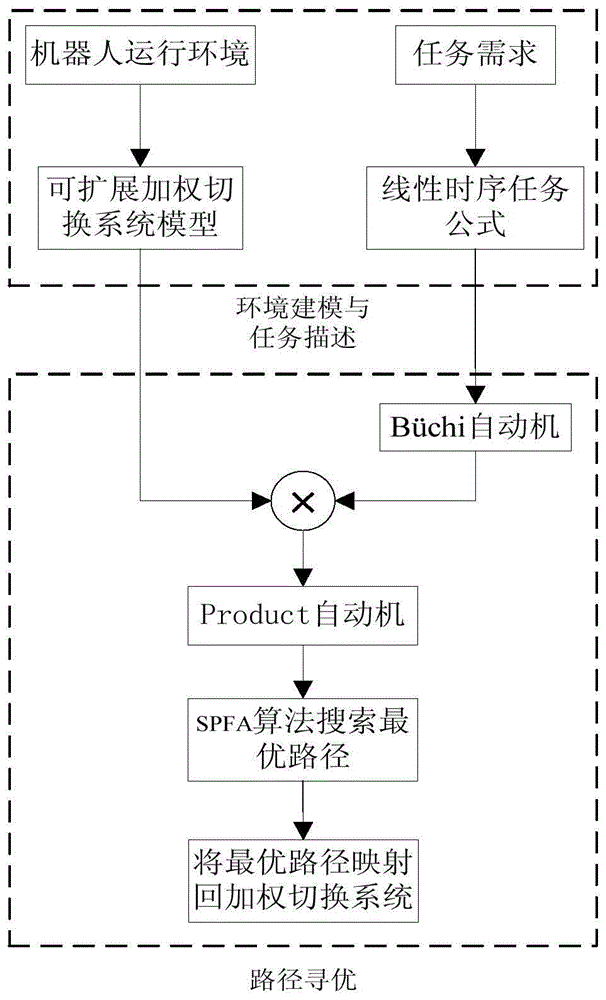
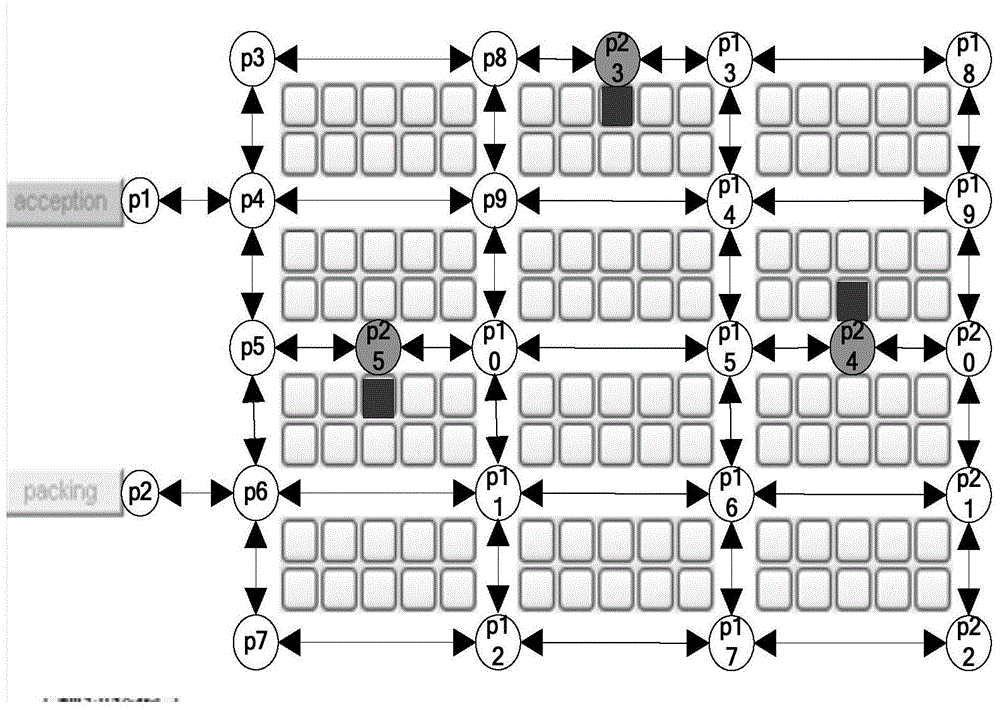
[0024] The storage robot path planning method based on the linear sequential logic theory of the present invention mainly has the following contents: firstly, the storage environment is modeled as an extensible weighted switching system and the linear sequential task formula is used to describe the storage dispatch task, and the task is The formula is converted into a graph form (Büchi automaton); then, the Cartesian product of the weighted switching system and the Büchi automaton constitutes the task-feasible network topology, and then the SPFA algorithm is used to search for the optimal path on the task-feasible network topology, and the The path mapping obtained by optimizing the task-feasible network topology will weight the switching system to obt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More