

Adaptive Model Predictive Control for Vehicle Route Planning
A vehicle model and vehicle technology, applied in electrical control, control devices, vehicle components, etc., can solve problems such as loss of model resolution, interference amount resolution, etc., to reduce computing resources and improve optimization efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
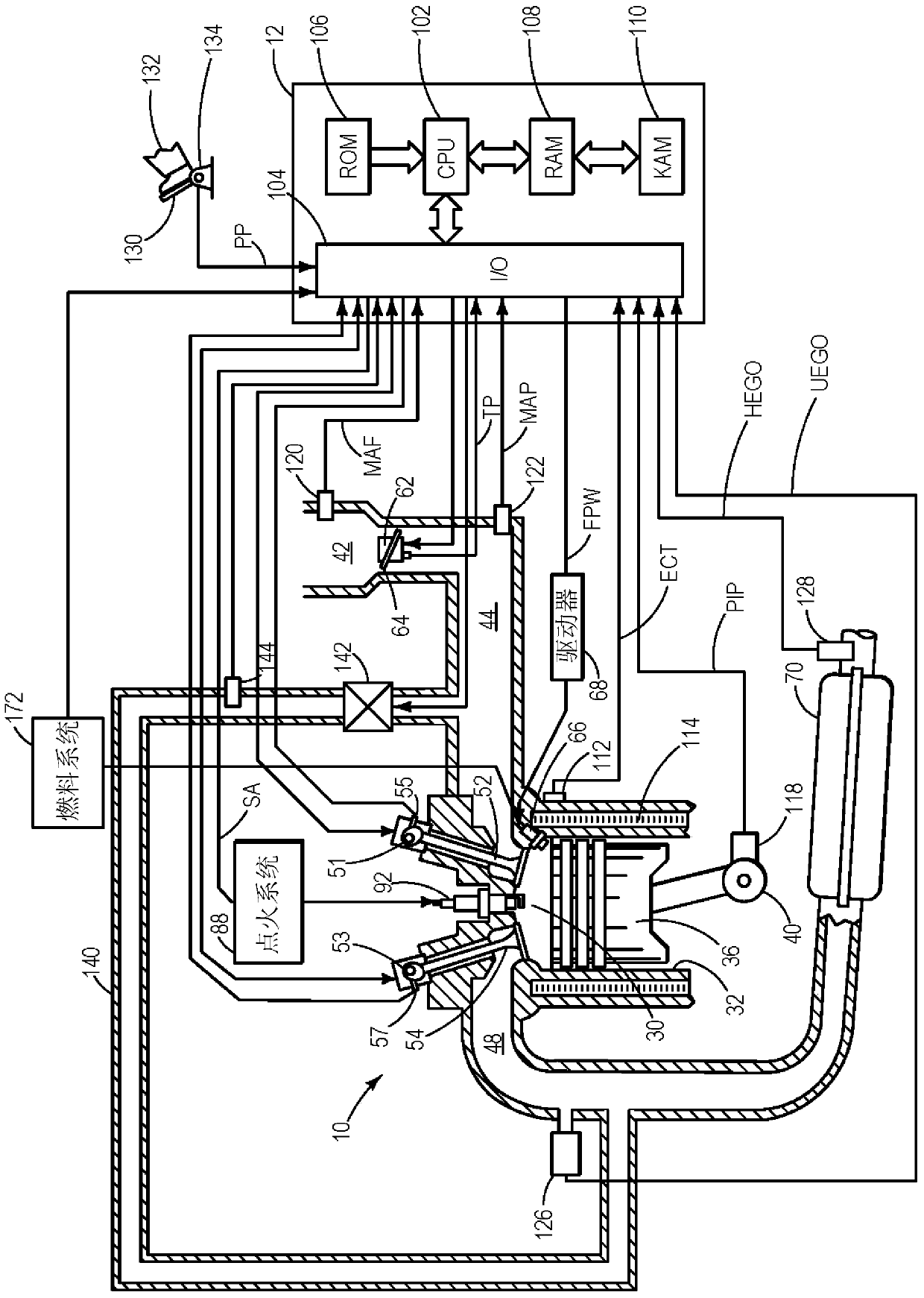
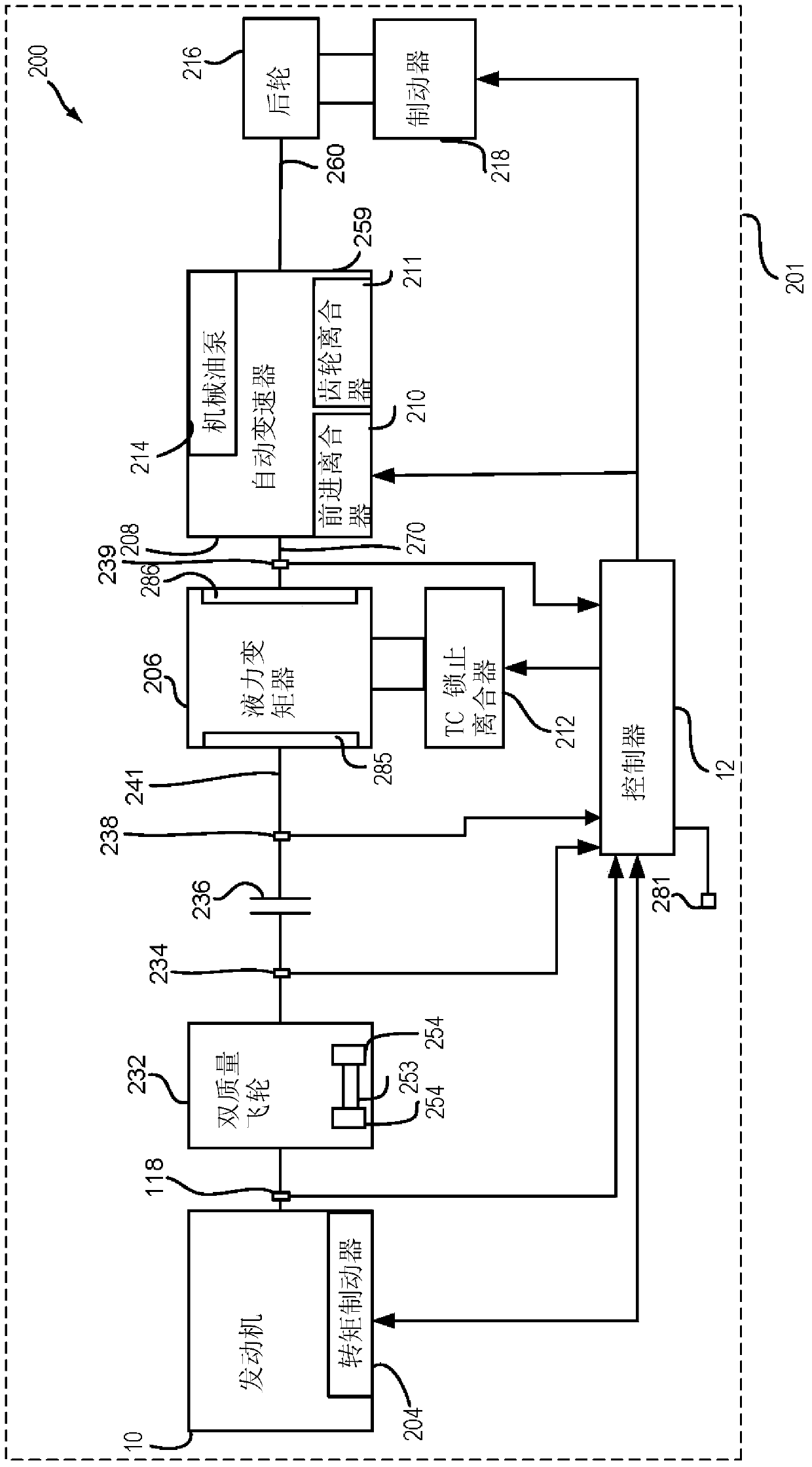
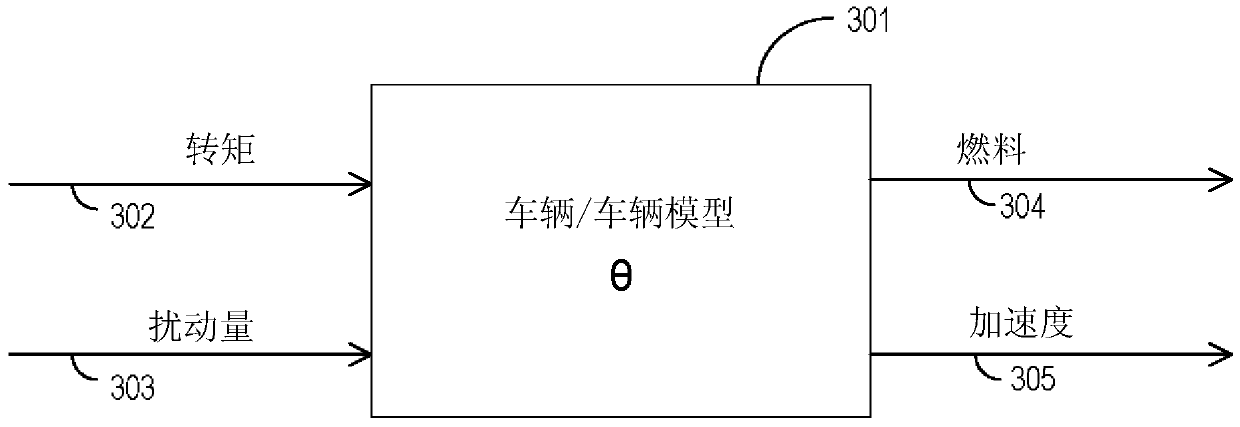
[0017] The following description relates to systems and methods for determining an optimal torque distribution for a given vehicle with a known amount of disturbance along a route. A model predictive control problem is formulated to determine optimal engine torque by minimizing vehicle fuel consumption over a time domain. figure 1 An example engine system of a vehicle is shown. figure 2 An example configuration of a vehicle driveline is shown. exist image 3 The block diagram shown in shows an MPC problem constructed from the input and output of an example vehicle model. Figure 4 An example method for determining optimal engine torque to minimize fuel consumption is shown. Figure 5A with Figure 5B The effect of the length of the time domain on the convergence of the MPC solution to the optimal solution is shown.
[0018] figure 1 Illustrated is a schematic diagram of one cylinder of a multi-cylinder engine 10 that may be included in a propulsion system of an automobi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More