

Micro gyroscope self-adaptive fuzzy sliding mode control method based on dynamic surface
A technology of adaptive fuzzy and control methods, which is applied in the directions of adaptive control, general control system, control/adjustment system, etc. It can solve the problems of reducing the sensitivity and accuracy of micro gyroscopes, reducing system chattering, and easy fluctuation of parameters and system parameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The technical scheme of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
[0082] The micro-gyroscope adaptive fuzzy sliding mode control method based on the dynamic surface includes the following steps:
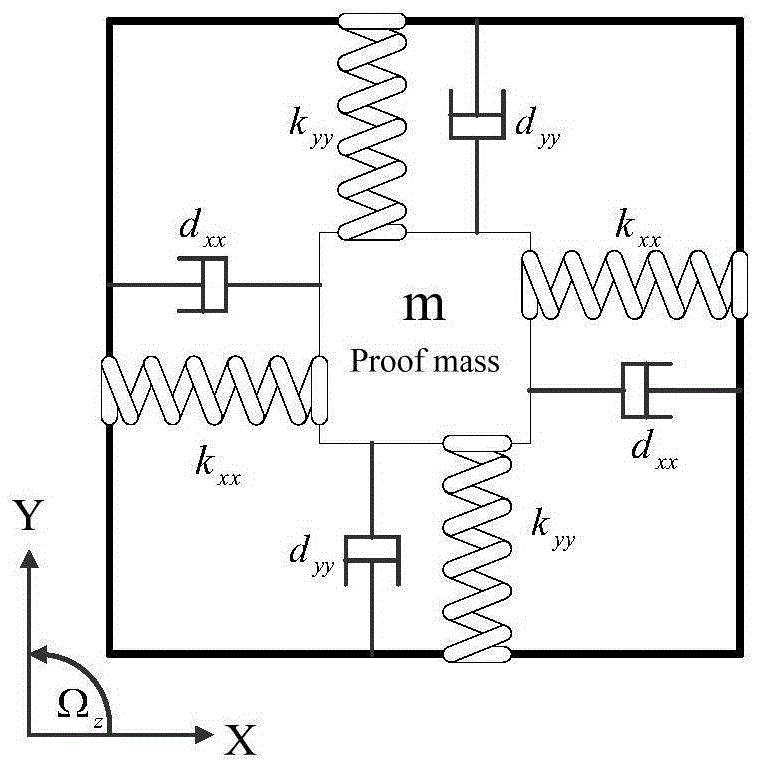
[0083] Step 1. Establish the mathematical model of the micro gyroscope:
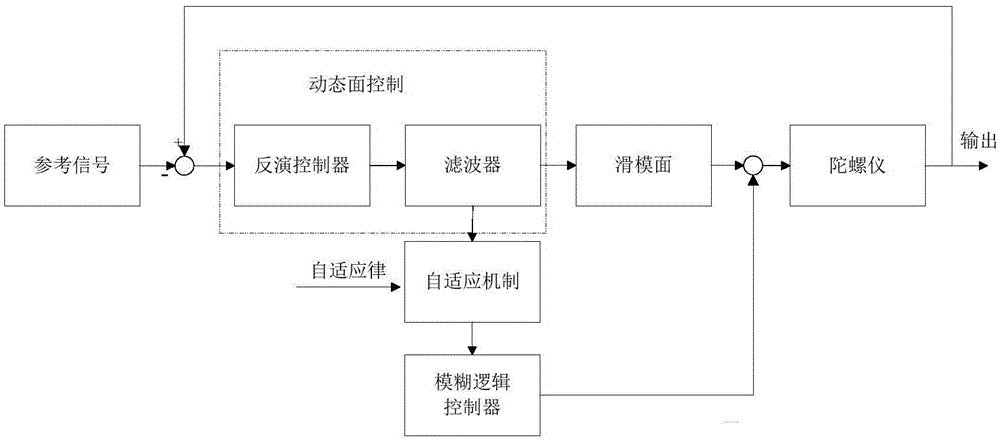
[0084] Step 2, using the fuzzy control method to approximate the dynamic characteristics of the micro gyroscope and the sum of external disturbances;
[0085] Step 3, designing an adaptive fuzzy sliding mode controller based on the dynamic surface;
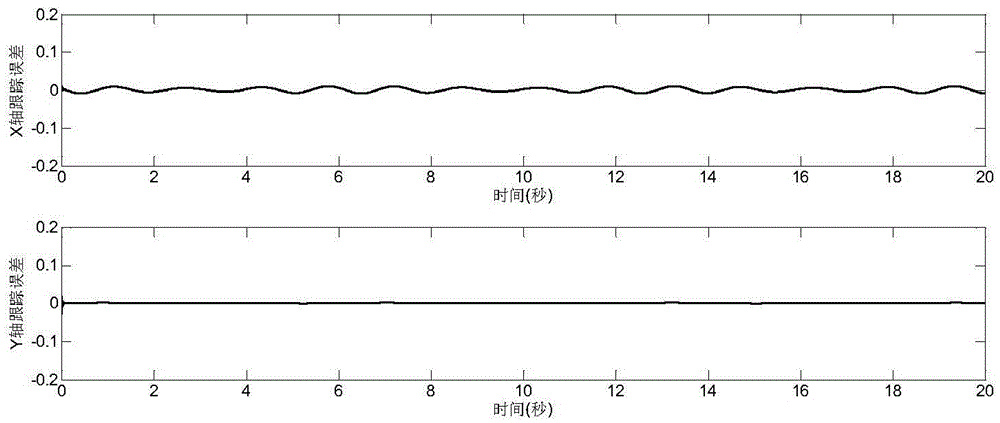
[0086] Step 4, controlling the micro gyroscope based on the adaptive fuzzy sliding mode controller.
[0087] Such as figure 1 As shown, a general micro gyroscope is composed of the following parts...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More