

Indeterminate body position estimation method, indeterminate body position estimation device and program
A shape and program technology, applied in the field of indeterminate shape position estimation, can solve the problems of difficult application and easily deformed indeterminate shape, and achieve the effect of high-precision position detection rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
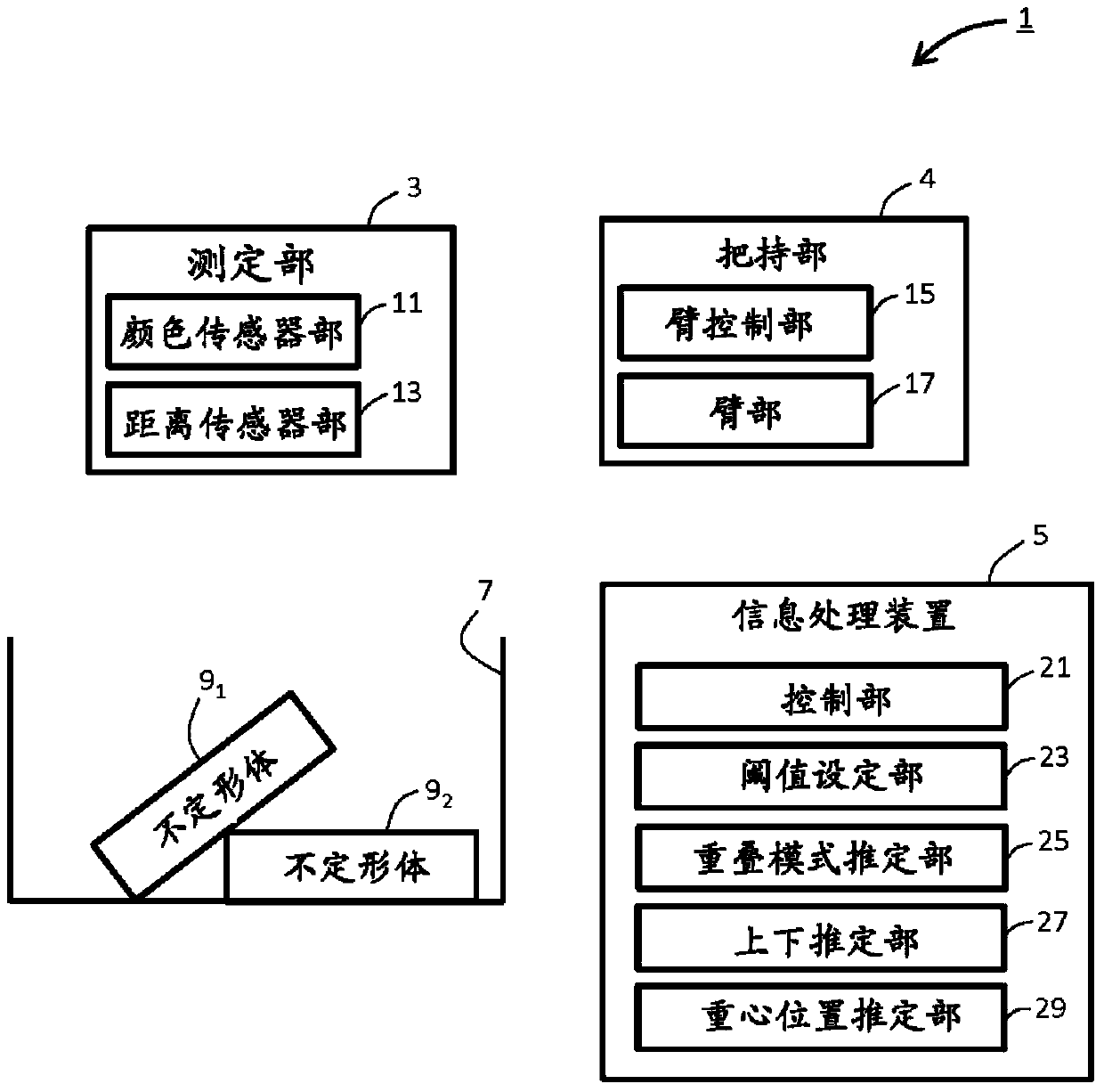
[0039] figure 1 It is a block diagram showing an example of the structure of the bin picking system according to the embodiment of the present invention. The bin picking system 1 includes a measuring unit 3, a gripping unit 4 and an information processing device 5. In the bin picking system 1, the measuring section 3 measures the inside of the box 7, and when the information processing device 5 determines that there is an amorphous body 9, the gripping section 4 performs a process of taking out the amorphous body 9. The processing is repeated until the amorphous body 9 becomes non-existent. in figure 1 , Shows that there are two amorphous bodies 9 in the box 7 1 And 9 2 Case. In the following, subscripts are sometimes omitted. A plurality of unshaped bodies 9 are loosely packed in the box body 7 and are skewed and overlapped due to vibration and impact during transportation. In addition, there are cases where they fall in the middle of picking and cause overlap.
[0040] The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More