

Five-shaft cradle type numerical control machine tool non-deformation cutting three-dimensional geometrical modeling method
A technology of CNC machine tools and 3D geometry, applied in simulators, program control, computer control, etc., can solve problems such as poor modeling accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
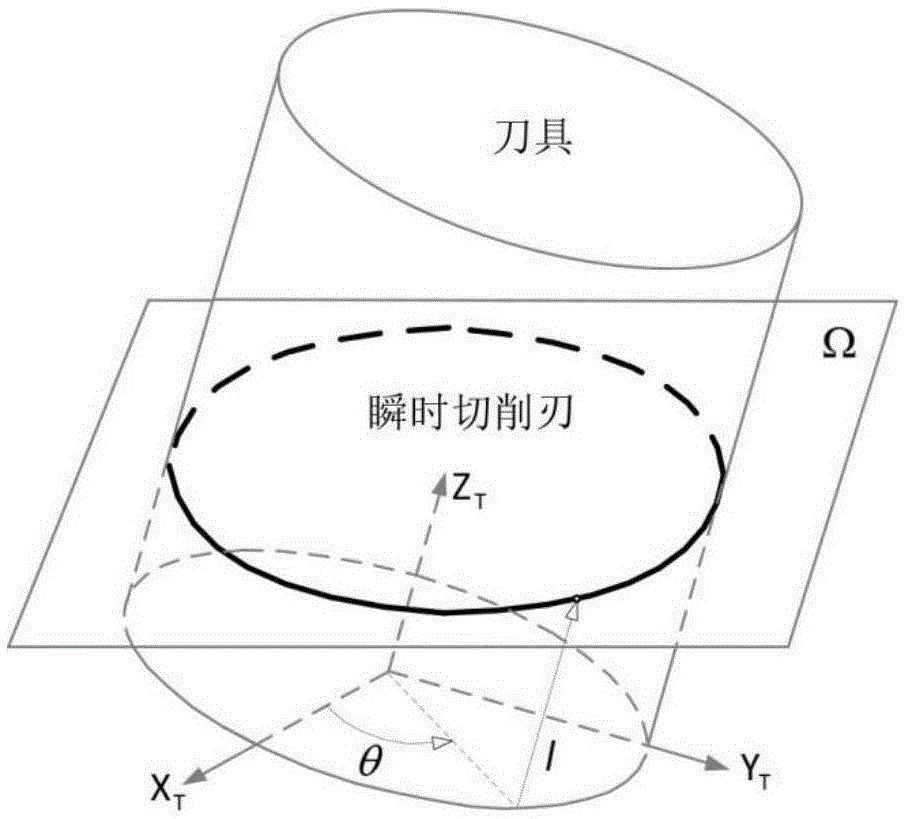
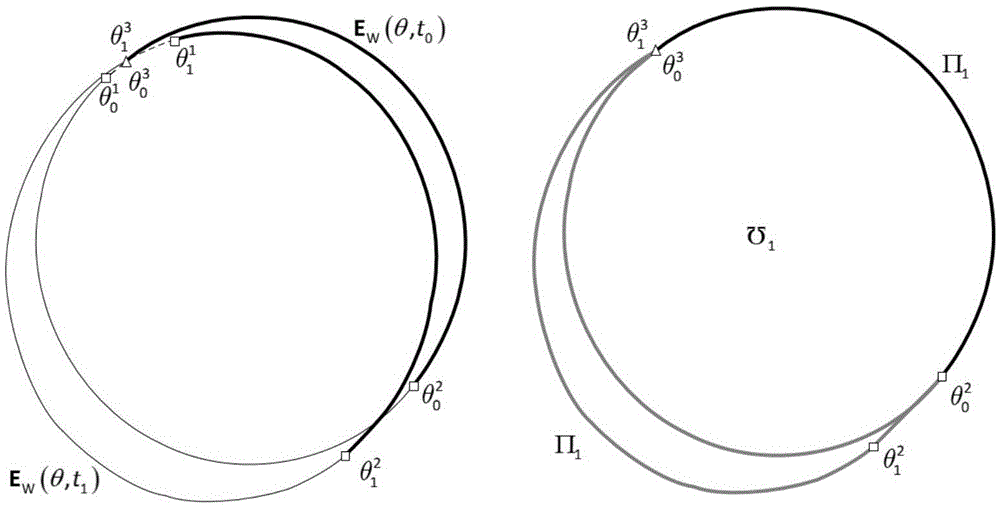
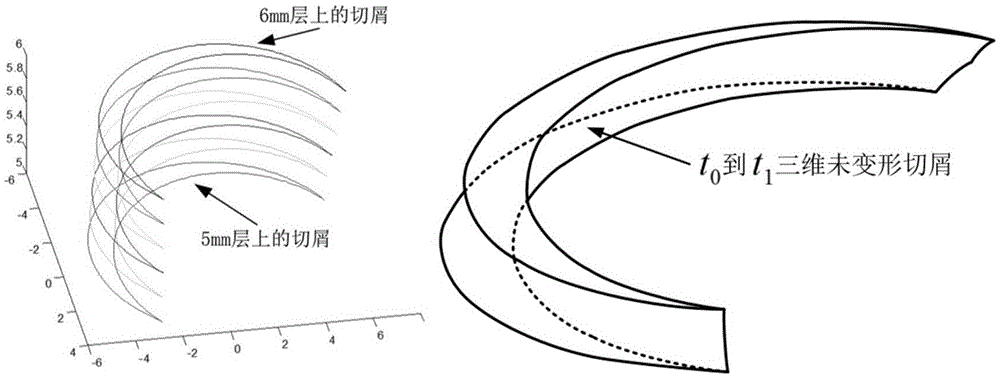
[0055] refer to Figure 1-3 . The specific steps of the three-dimensional geometric modeling method of the undeformed chips of the five-axis cradle type CNC machine tool of the present invention are as follows:
[0056] 1. The solution of the movement amount of each movement axis of the five-axis cradle CNC machine tool at any instant.
[0057] Given two continuous tool poses of a cradle-type five-axis CNC machine tool, the movement amounts corresponding to each movement axis of the machine tool are [x M,1 the y M,1 z M,1 A 1 C 1 ] = [13.123mm0.833mm42.089mm-0.292rad3.145rad] and [x M,2 the y M,2 z M,2 A 2 C 2 ]=[5.297mm8.674mm42.053mm-0.955rad3.927rad]. Then use the linear interpolation method to calculate the movement amount of each movement axis of the tool at any time between two tool positions according to the following formula.
[0058] X M ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More