

UUV dynamic obstacle avoidance method based on speed obstruction method
A speed obstacle and dynamic obstacle avoidance technology, which is applied in non-electric variable control, height or depth control, vehicle position/route/height control, etc., can solve the problems of poor accuracy of moving obstacles, reduce the impact of collisions, and improve avoidance. The effect of touching safety and avoiding conservative problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
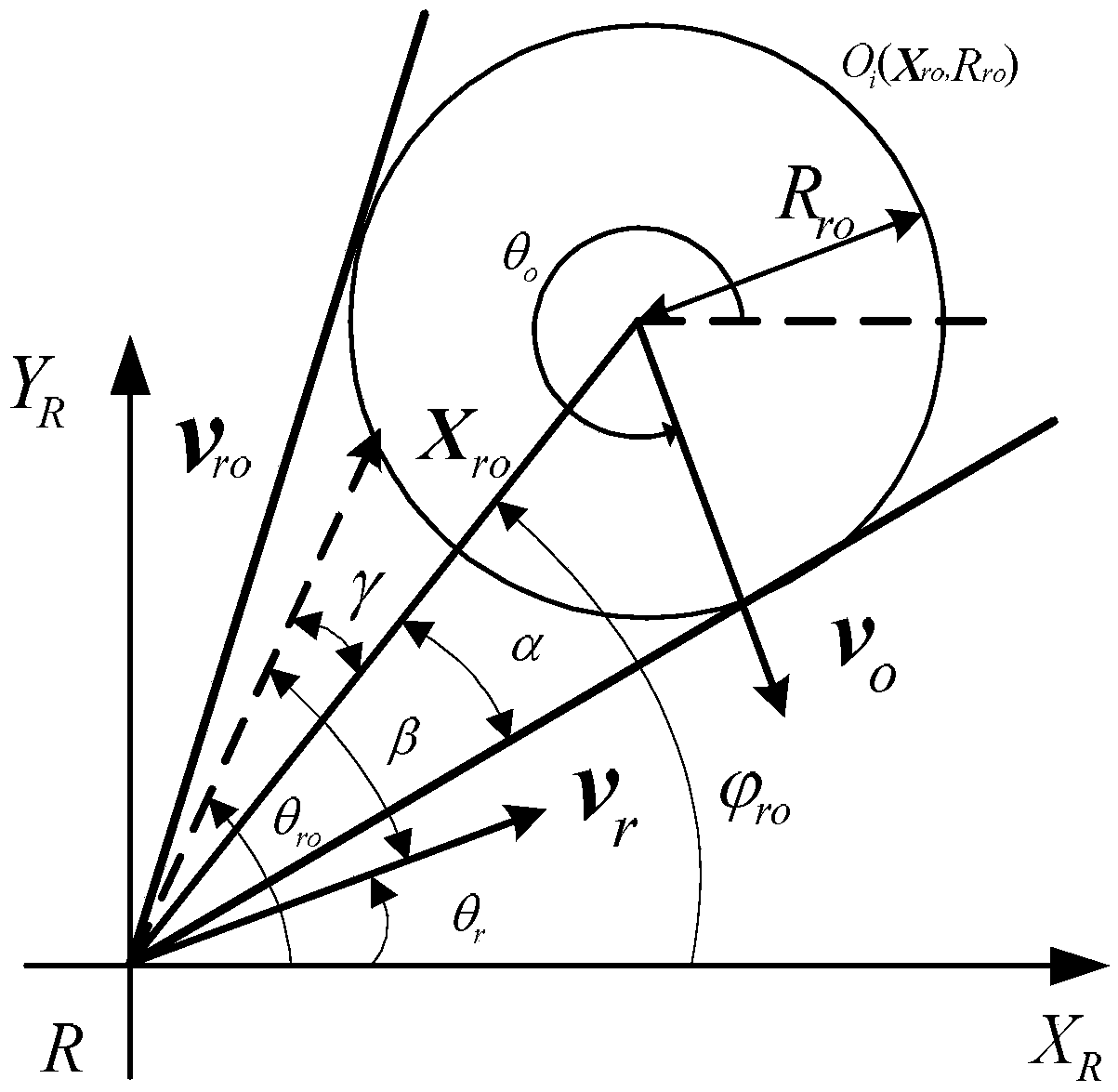
[0022] Specific implementation mode 1. Combination figure 1 , figure 2 and image 3 Describe this embodiment, a UUV dynamic obstacle avoidance method based on the speed obstacle method described in this embodiment, the specific steps of this method are:
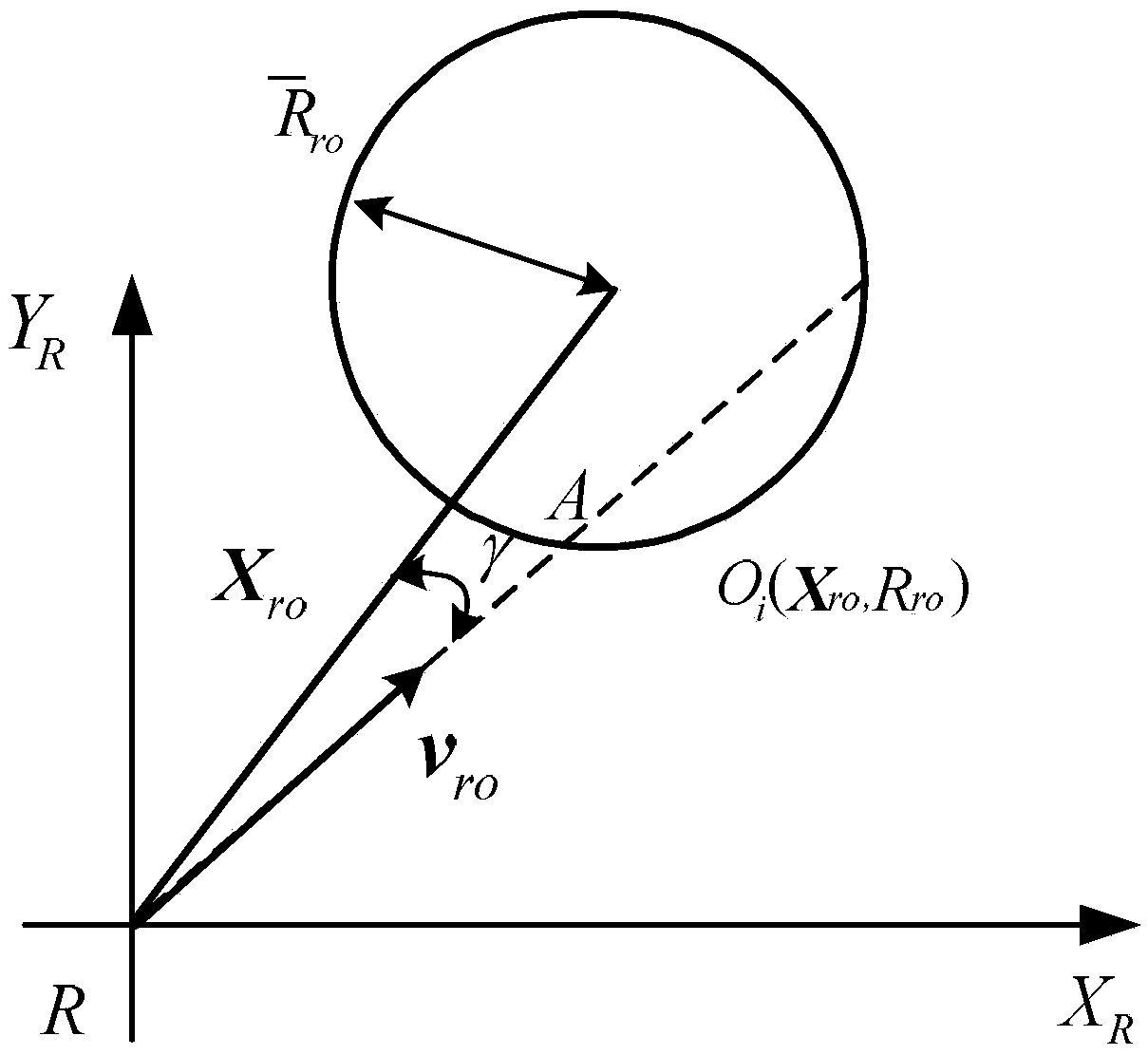
[0023] Step 1: Transform the movement uncertainty of the obstacle into the position uncertainty, and obtain the obstacle O i lower bound estimate of radius R ro and obstacle O i upper bound estimate of the radius
[0024] Obtain the obstacle O according to the movement uncertainty of the obstacle i lower bound estimate of radius R ro : R ro =R o +R r +δ p
[0025] Obstacle O i upper bound estimate of the radius
[0026] δ p is the estimated deviation of the obstacle radius, ΔR o is the estimated upper limit of the obstacle motion uncertainty, R safe is the safety distance, R o is the obstacle radius, R r is the UUV radius;
[0027] Estimated lower bound based on obstacle radius R ro , calculate th...
specific Embodiment
[0059] The UUV sails from the starting point (0, 0) to the ending point (450, 450), the starting heading is 45°, and three obstacles O are designed to cross and meet the UUV. 1 ,O 2 ,O 3 , assuming that the moving obstacle is set as a rectangle. Forward-looking sonar is used as the collision avoidance sensing device when the position and motion information of obstacles is unknown. Use the formula (1) to get the speed risk of the moving obstacle, use the formula (3) to get the accessible speed space of the moving obstacle, use the formula (13) to get the coefficient in the optimization objective function. Then, the speed obstacle method is used to find the minimum point of the objective function value, which is used as the next waypoint to realize UUV route planning step by step. Simulation trajectory such as Figure 4 shown.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More