

Permanent magnet rotating speed difference clutch and self-adaption nonsingular terminal slip form rotating speed control method thereof
A non-singular terminal and clutch technology is applied in the field of permanent magnet slip clutch adaptive non-singular terminal sliding mode speed control, which can solve problems such as external interference and parameter perturbation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described in detail below in conjunction with the accompanying drawings.
[0051] A permanent magnet slip clutch adaptive non-singular terminal sliding mode speed control method, the specific steps are as follows:
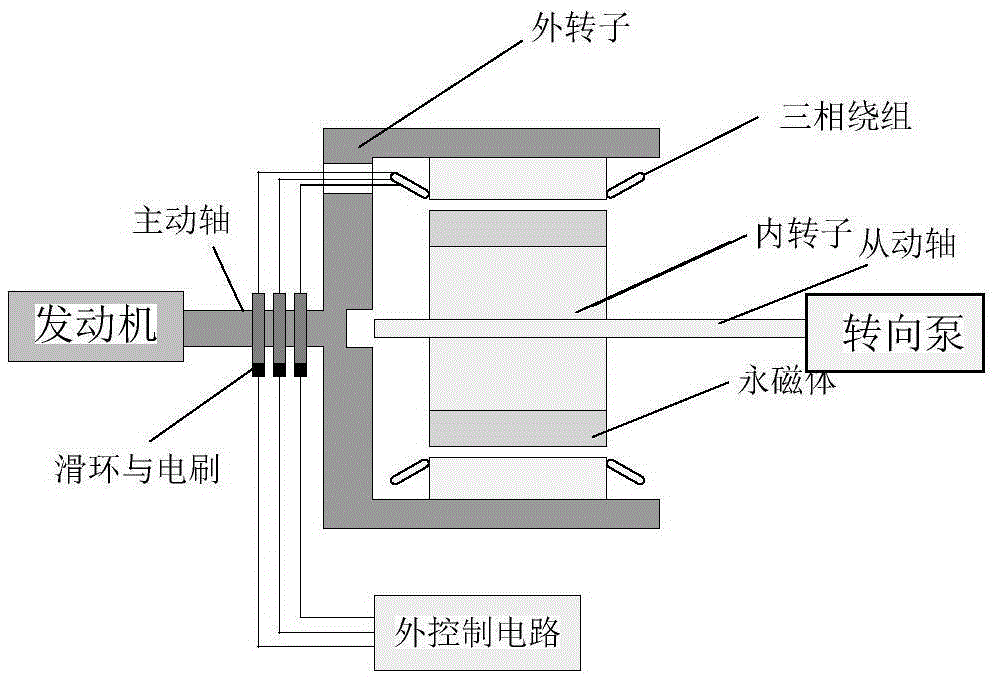
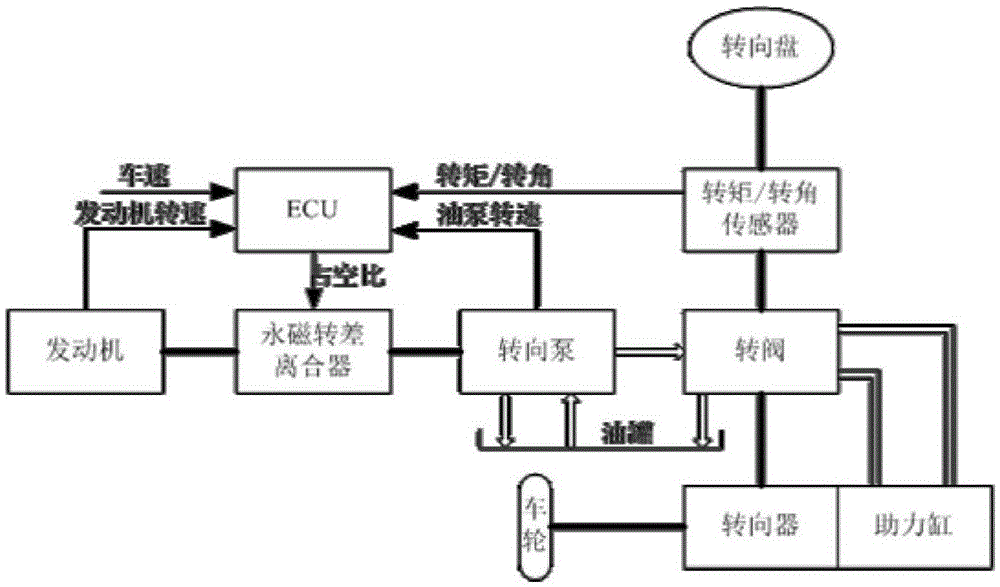
[0052] Step 1: Build a permanent magnet slip clutch type electronically controlled hydraulic power steering system
[0053] Such as figure 1 , As shown in 2, the permanent magnet slip clutch is mainly composed of an outer rotor, an inner rotor and an outer control circuit. The outer rotor is embedded with three-phase windings, which are connected to the external control circuit through slip rings and brushes, and the inner rotor is surface-attached with permanent magnets to form a hidden pole inner rotor structure. The outer rotor is the input end, which is connected to the engine through the driving shaft, and the inner rotor is the output end, which is connected to the steering pump through the driven shaft, thus for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More