

An Intelligent Parallel Mechanism Handling Robot Based on Hall Positioning System
A technology for handling robots and positioning systems, applied in the field of robotics, can solve problems such as unstable robots and inability of geomagnetic positioning robots to accurately locate, and achieve fast and accurate positioning, high stability, and simple system structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with specific examples. It should be understood that these examples are only used to illustrate the present invention and are not intended to limit the scope of the present invention. In addition, it should be understood that after reading the teachings of the present invention, those skilled in the art can make various changes or modifications to the present invention, and these equivalent forms also fall within the scope defined by the appended claims of the application.
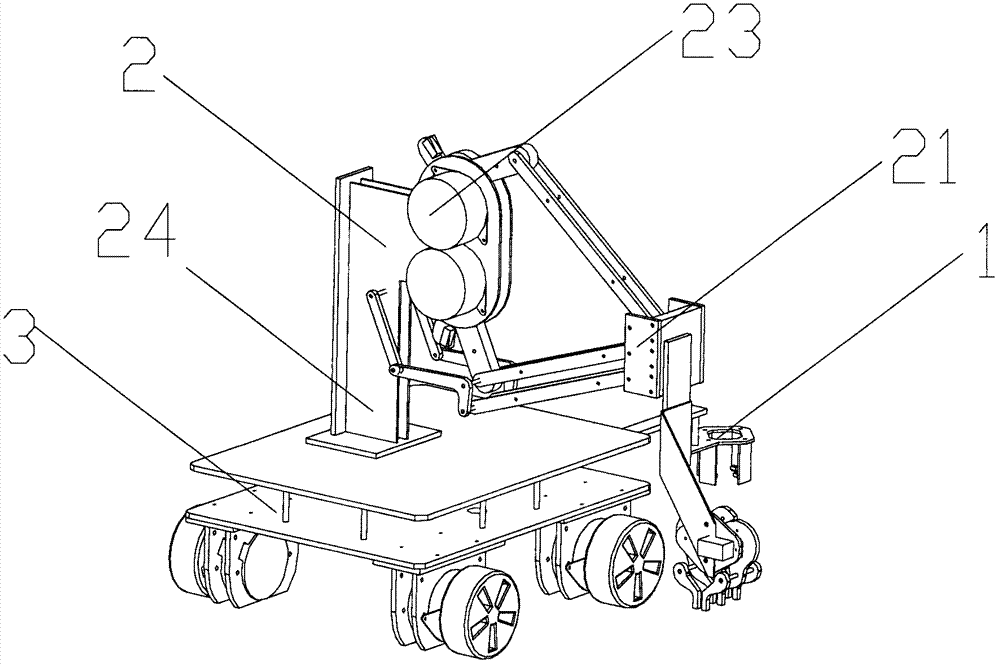
[0021] see Figure 1-7 , the present invention includes a positioning system 1, a grabbing mechanism 2, and a walking mechanism 3. The grabbing mechanism 2 includes a parallel arm 21, a machine gripper 22, a grabbing stepping motor 23, and a support base 24. The parallel arm 21 and the grabbing step The feeder motor 23 is connected, and one end of the parallel arm 21 is connected with the machine gripper 22, and the grabbing steppi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More