

Unmanned aerial vehicle landing method based on optical flow method and horizon line detection
A UAV, horizon technology, applied in aircraft landers, unmanned aerial vehicles, motor vehicles, etc., can solve the problems of inability to obtain UAV attitude information, detection errors, etc., to reduce the amount of calculation and increase the accuracy rate , the effect of improving the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
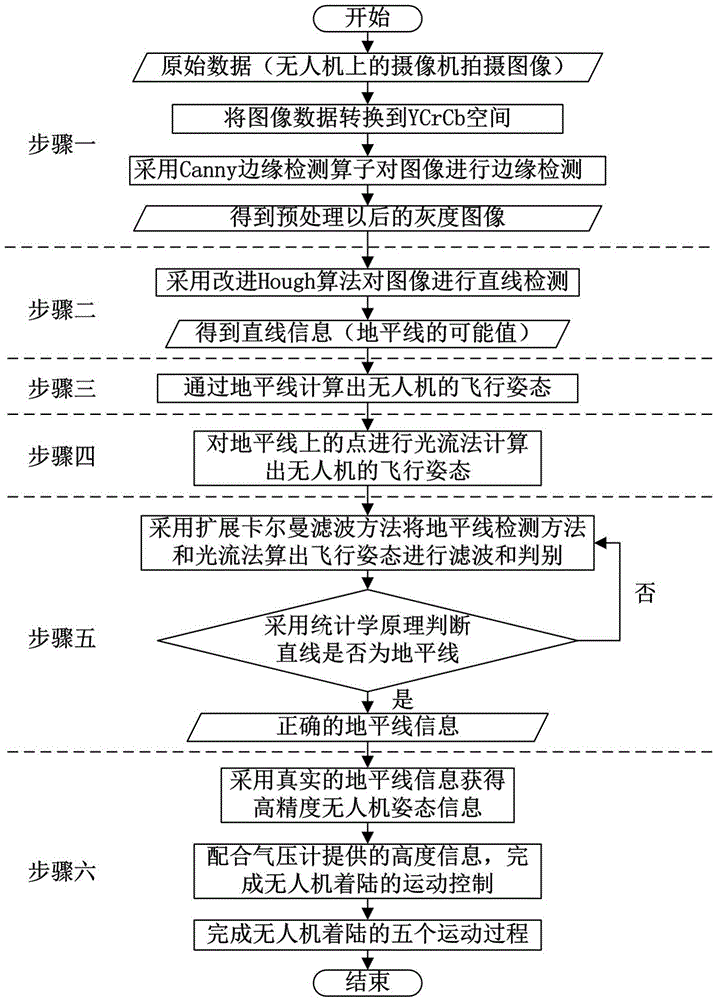
[0078] Specific Embodiment 1: This embodiment provides a UAV landing method based on the optical flow method and horizon detection. The horizon is detected by using the straight line detection method for the image, and the roll in the flight attitude of the UAV is calculated according to the horizon. Rotation angle and azimuth angle; use the optical flow method to calculate the pose of the UAV for the horizon in the sequence images taken during the flight of the UAV; use the extended Kalman filter method to reduce the detection error rate of the horizon in the method, and by the position It can switch between the five stages of UAV landing, and cooperate with the horizon method to complete the autonomous landing process of UAV landing one by one.
[0079] like figure 1 As shown, it is divided into five steps, and the specific steps are as follows:
[0080] Step 1: Perform image preprocessing on the video captured by the camera fixed at the bottom of the drone during the flig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More