

Tumbler with gravity center controllable and gravity center control method for tumbler
A tumbler and center of gravity technology, applied in the direction of gravity-driven toys, entertainment, toys, etc., can solve the problems of weak competitiveness, changing tumblers, and reduced attractiveness, so as to increase fun and expand the user market.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
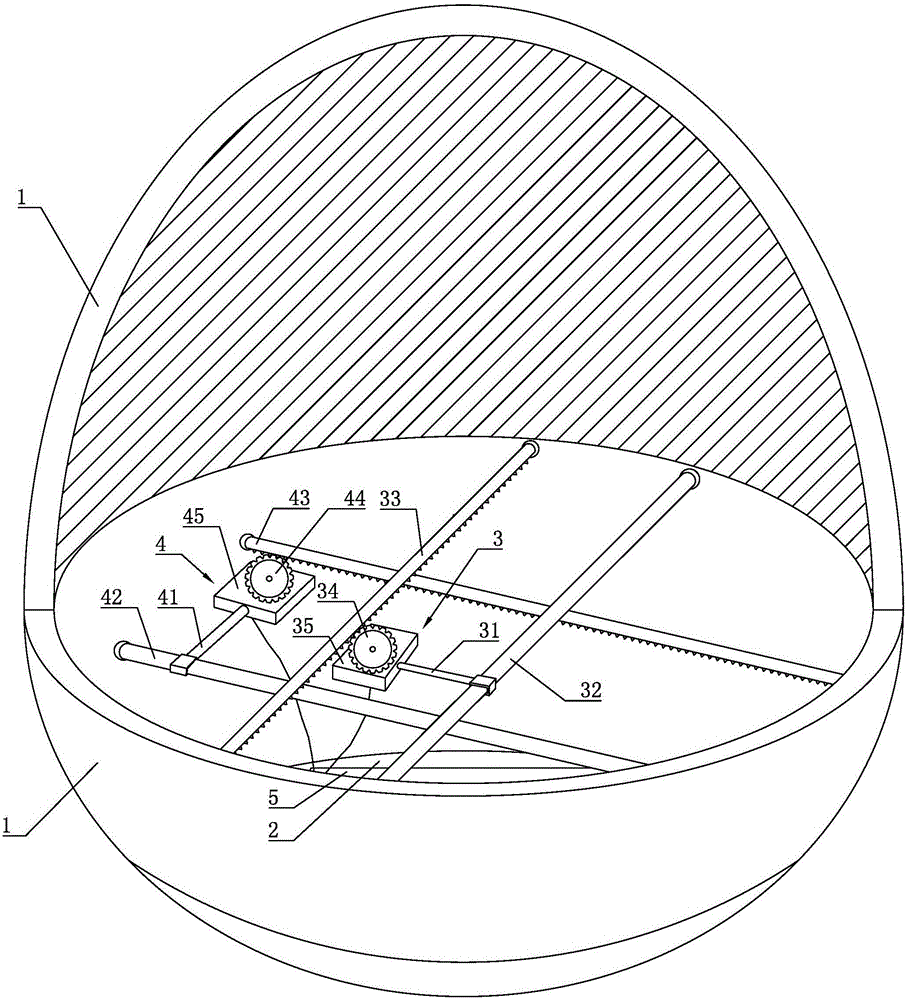
[0026] Embodiment 1: A tumbler with a controllable center of gravity, including a tumbler shell 1 with a hemispherical bottom, a weight block 2 for balancing is arranged inside the tumbler shell 1, and a first positioning component 3, a second Two positioning assemblies 4 and control modules 5, the first positioning assembly 3 includes a first positioning block, a first driving device and a first guiding mechanism, and the second positioning assembly 4 includes a second positioning block, a second driving device and a second guiding mechanism , the first driving device and the second driving device are respectively electrically connected to the control module 5, the first driving device is used to drive the first positioning block to move on the first guide mechanism, and the second driving device is used to drive the second positioning block to move on the first guide mechanism. The second guiding mechanism moves upwards, the first guiding mechanism and the second guiding mech...
Embodiment 2
[0033] Embodiment 2: The remaining parts are the same as Embodiment 1, except that the first plane formed by the first sliding guide rods 32 parallel to each other and the first alveolar guide rods 33 and the second sliding guide rods parallel to each other 42 and the second alveolar guide rod 43 are parallel to each other, and the orthographic projection of the first sliding guide rod 32 on the second plane is perpendicular to the second sliding guide rod 42 .
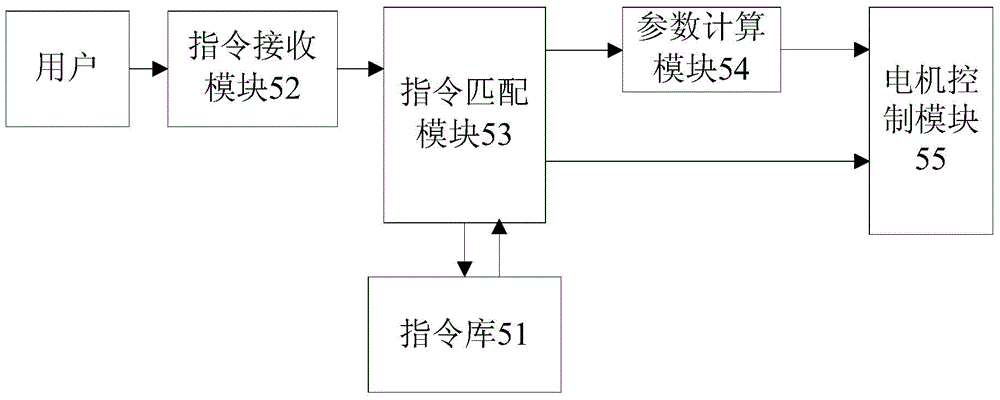
[0034] The function to be calculated for calculating the motor control parameters according to the parameters to be calculated and the calculation sequence number can be preset in the parameter calculation module 54. Since the first plane and the second plane are parallel to each other, and the first sliding guide rod 32 is on the second plane The orthographic projection on is perpendicular to the second sliding guide rod 42, so the process of obtaining the function to be calculated by conventional mathematical and phy...
Embodiment 3
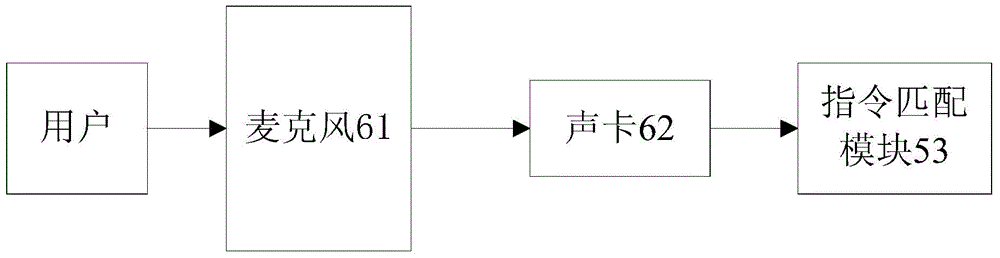
[0035] Embodiment three: all the other parts are the same as in embodiment one, the difference is that the command receiving module 52 is a voice command receiving module, the voice command receiving module includes a microphone 61 and a sound card 62, and the microphone 61 is used to receive input from the user and include effective The voice command of the control command is converted into a corresponding analog signal and the analog signal is sent to the sound card 62 , and the sound card 62 is used to convert the received analog signal into a corresponding digital signal and send the digital signal to the command matching module 53 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More