

Wearable equipment, unmanned plane control device and control realization method
A wearable device, drone technology, applied in the field of human-computer interaction, can solve the problems of portability, inconvenience of operation, poor user experience, etc., to achieve the effect of enhancing user experience, simple system implementation, and realizing interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
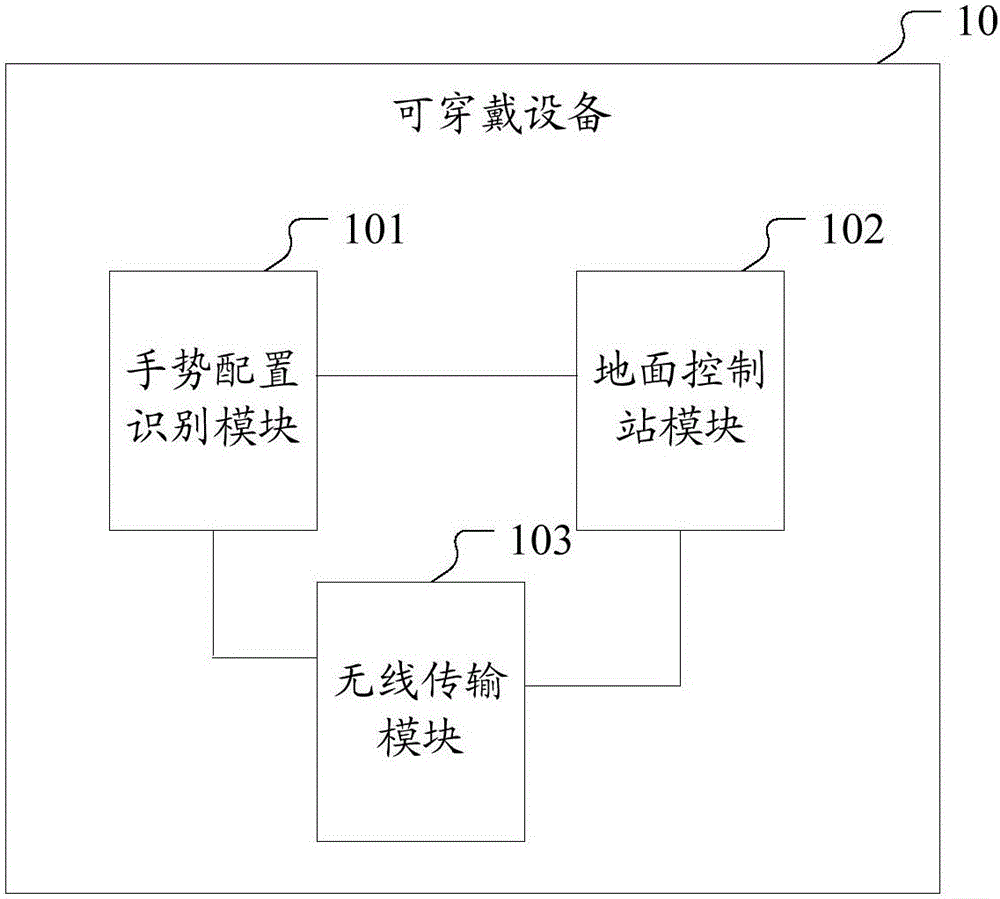
[0051] figure 1 It is a structural block diagram of a wearable device according to an embodiment of the present invention, see figure 1 , the wearable device 10 includes: a gesture configuration recognition module 101, a ground control station module 102 and a wireless transmission module 103;
[0052] The gesture configuration recognition module 101 is used to obtain the wearer's feature data to be recognized through sensor collection, recognize the wearer's current gesture, find the correspondence between the pre-configured and saved gesture and the drone control command, and use the The UAV control command corresponding to the gesture action is sent to the ground control station module 102;
[0053] The ground control station module 102 is used to receive the UAV control command through the data interface with the gesture configuration recognition module 101, encode the UAV control command and convert it into a control message conforming to the UAV communication protocol. ...
Embodiment 2
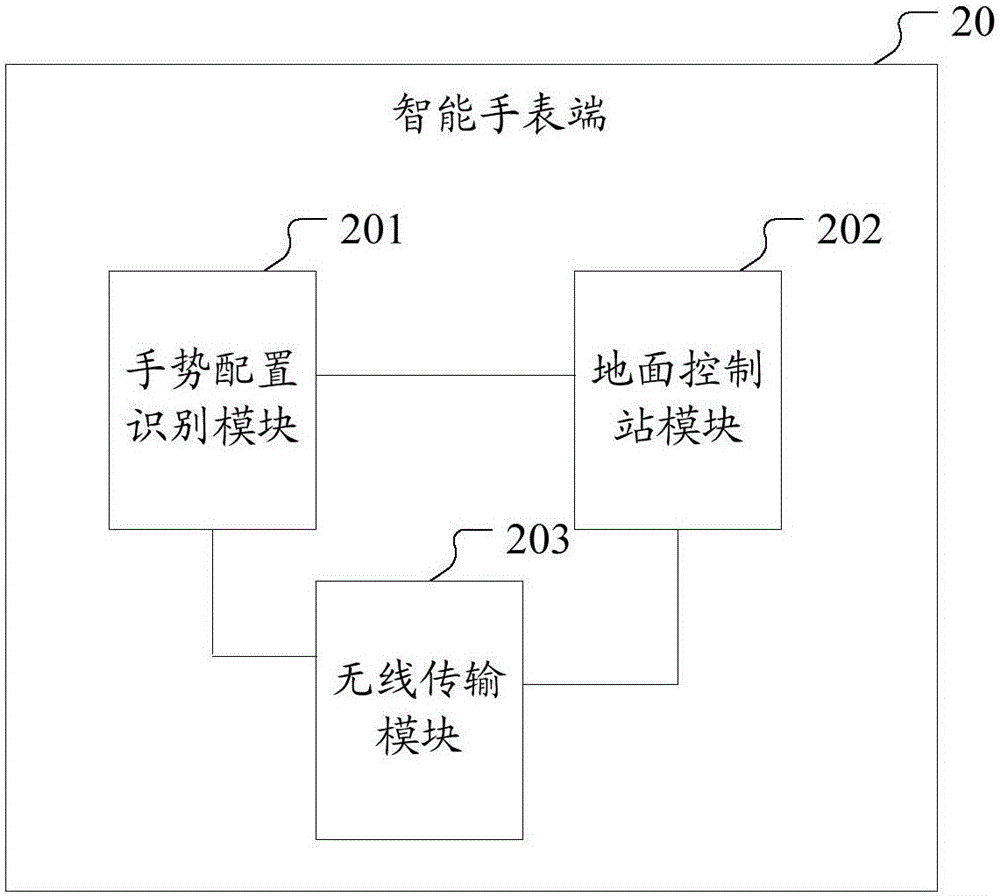
[0062] figure 2 It is a structural block diagram of the smart watch end of an embodiment of the present invention. In this embodiment, the functional structure of the wearable device is mainly illustrated by taking the smart watch as an example. For other contents, refer to other embodiments of the present invention.
[0063] When using a smart watch to control the drone for the first time, first connect the smart watch to the drone through a wireless method such as BLE (Bluetooth Low Energy, Bluetooth Low Energy), and then control the drone. The smart watch establishes the correspondence between optional gestures or default gestures and drone control commands, and the optional gestures can be customized by the wearer in the smart watch's interactive interface. The default gestures are pre-saved in the smart watch, and the user does not need to design the application himself, which is convenient for the user to use directly.
[0064] In this embodiment, the smart watch termi...
Embodiment 3
[0097] Figure 4 It is a schematic diagram of the workflow of the smart watch end of an embodiment of the present invention, see Figure 4 , a control process of the smart watch includes the following steps S41 to S46:
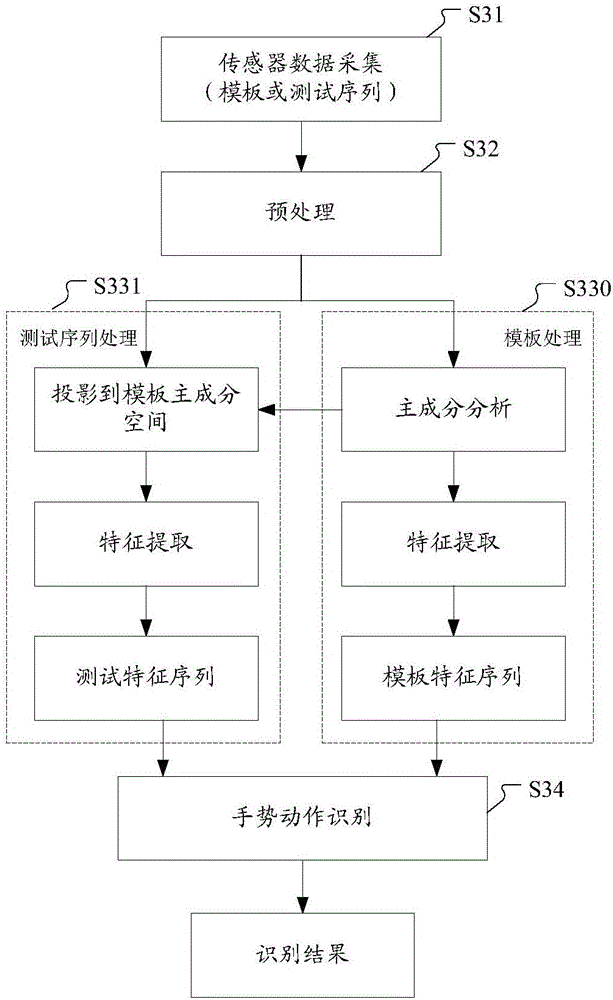
[0098] Step S41, the sensor collects data;
[0099] The wearer's feature data to be identified is collected through sensors, where the sensors include acceleration sensors and angular velocity sensors (such as gyroscopes), and the wearer's to-be-identified triaxial acceleration data sequence or three-axis acceleration data sequence is obtained through triaxial acceleration sensors or triaxial angular velocity sensors. Shaft angular velocity data sequence.
[0100] Step S42, judging whether it is gesture data, if yes, execute step S43, otherwise execute step S41;
[0101] Specifically, take the acceleration sensor as an example. After the three-axis acceleration data signal is collected, the amplitude change and variance of the acceleration data will be coun...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More