

Online Sequential Extreme Learning Machine Method with Self-Learning Capability
A technology with sequence limit and self-learning, applied in the field of intelligent robots, it can solve the problems of poor real-time performance, low intelligence of robot obstacle avoidance and navigation, and low learning rate.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
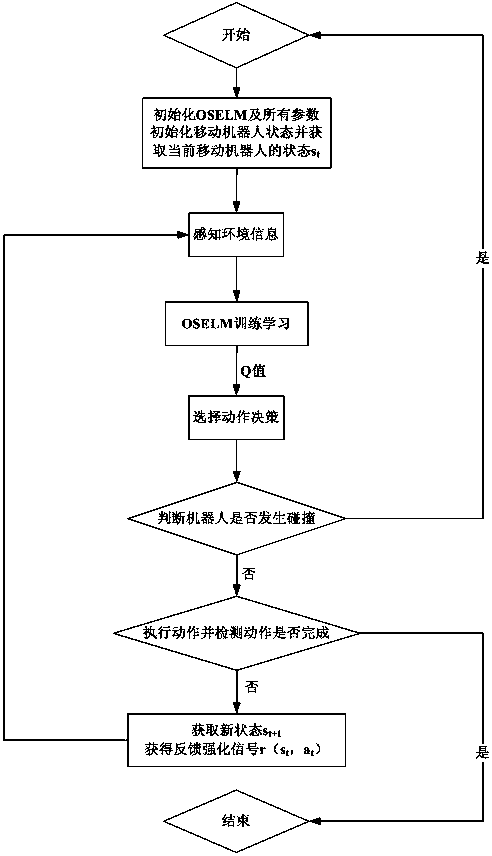
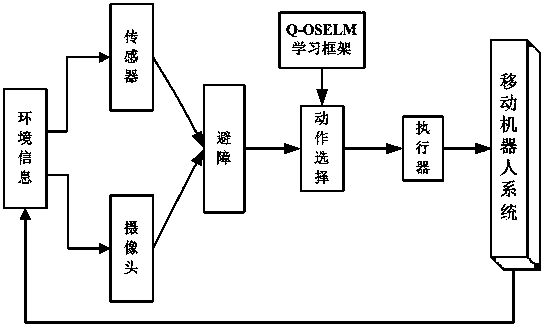
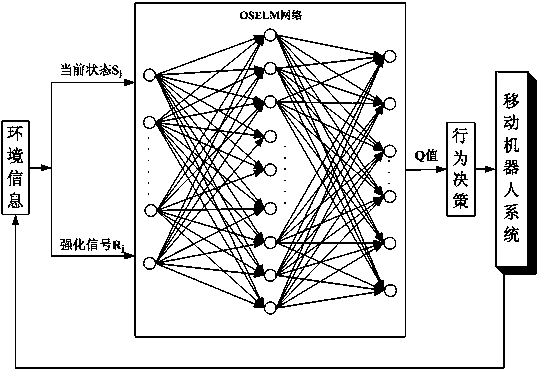
[0075] The learning frame diagram of the present invention is as image 3 shown, and in accordance with figure 1 The flow shown is for training and learning. figure 2 The intelligent control structure model of the robot is given, which shows how the robot completes collision avoidance through autonomous learning.
[0076] Before an intelligent robot completes a series of tasks, it must first ensure that it can quickly adapt to the environment in real time and complete corresponding tasks. Therefore, the mobile robot recognizes the scene and completes the motion control of avoiding obstacles, which is called the primary task of the robot. In order to verify the validity and convergence of an extreme learning machine model with autonomous learning ability proposed by the present invention, the experiment takes a mobile robot as the research object to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More