Potential game-based multi-unmanned aerial vehicle cooperative search method
A technology of multiple drones and search methods, applied in the field of autonomous control of drones, can solve problems such as inconsistency of communication information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The following uses a specific example to verify the performance of a potential game-based multi-UAV cooperative search method proposed by the present invention. The experimental computer configuration is IntelCoreDuoCPUT6600 processor, 2.2Ghz main frequency, 4G memory, MATLAB2013 version. Its concrete implementation steps of this method are as follows:
[0082] Step 1: Multi-UAV collaborative search problem modeling and parameter initialization setting
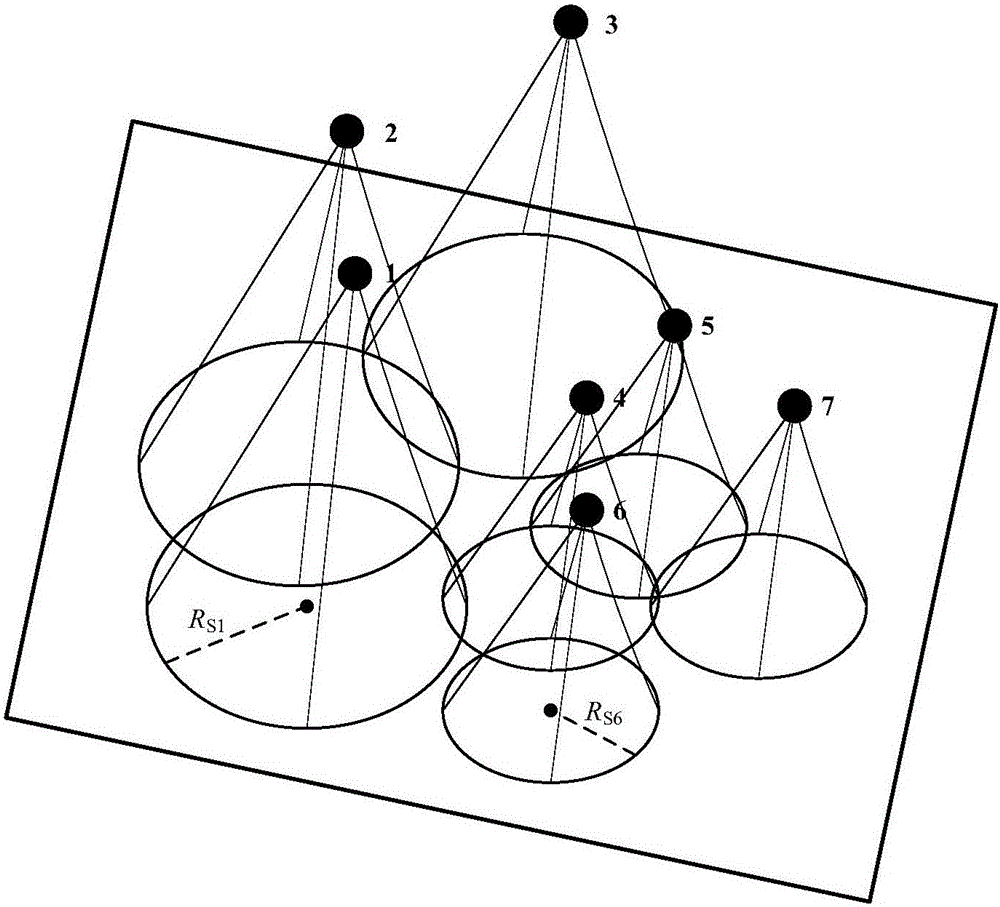
[0083] Consider using 10 drones (denoted as V={v 1 ,v 2 ,...,v n}) for an unknown region Search, each UAV as an independent decision maker adopts a distributed strategy to explore the task area, the regional schematic diagram is shown in the attached figure 1 (For convenience, only 7 frames are shown in the schematic diagram). contiguous task area The average distribution is M=100×80 basic units, and each unit uses its center position g=[x,y] T equivalent instead. UAV v i its coverage at time t An independ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More