Pipeline robot and method for conducting pipeline detecting through pipeline robot
A pipeline robot, the technology of the robot body, applied in the field of robots, can solve the problems of difficult to capture the pipeline, difficult to capture the appropriate position, difficult to adjust the speed and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with the examples, but the protection scope of the present invention is not limited only to the examples.
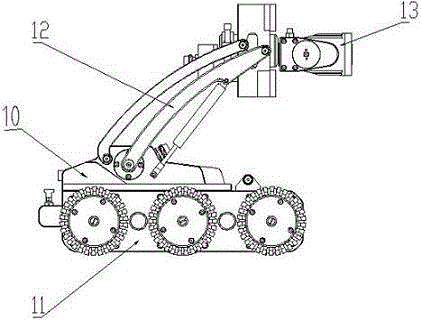
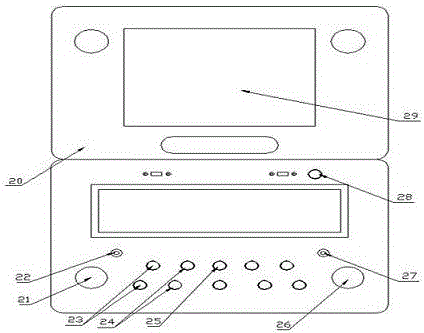
[0015] see figure 1 , figure 2 , a kind of pipeline robot of the present invention comprises two parts, and a part is the control box 20 on the ground, and another part is the robot body 10 that enters underground pipeline detection. The control box 20 is connected to the robot body 10 through a cable (not shown in the figure). On the one hand, the cable can provide power for the robot body 10 , and on the other hand, it is also used for information transmission between the control box 20 and the robot body 10 .
[0016] Such as figure 1 As shown, the robot body 10 mainly includes a crawler 11 , a lifting arm 12 , and a camera 13 . One end of the lifting arm 12 is connected to the crawler 11 , and the other end is connected to the camera 13 . The function of the crawler 11 is to carry the ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More