

Transformer substation patrol and inspection robot with rod climbing function and drive method for transformer substation patrol and inspection robot
A technology for inspection robots and substations, which is applied to motor vehicles, manipulators, manufacturing tools, etc. It can solve the problems of unfavorable application and promotion of robot inspections, large engineering volume, and difficult changes, etc., and achieves compact structure, precise and reliable control, and simple principle Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
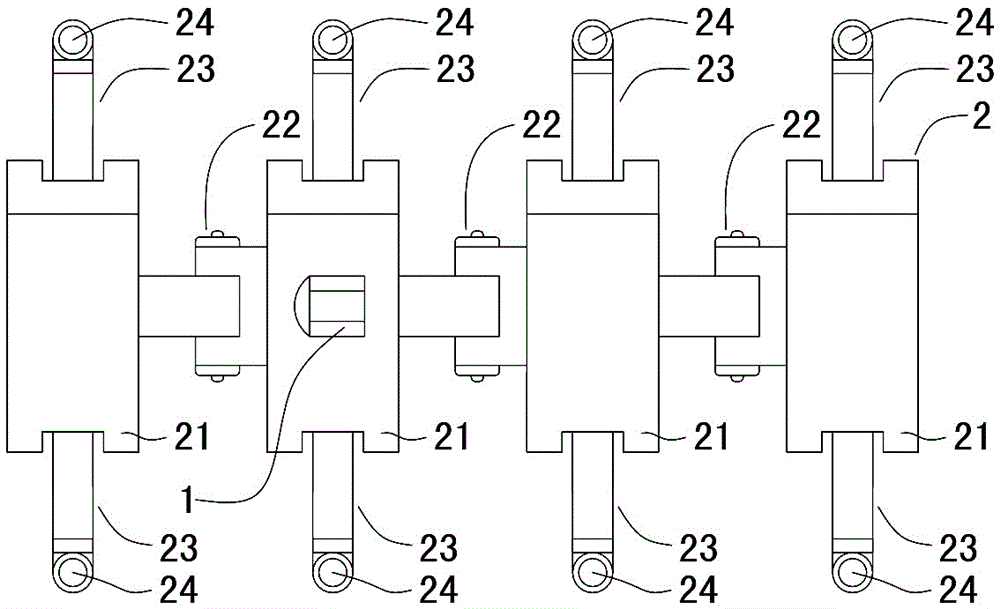
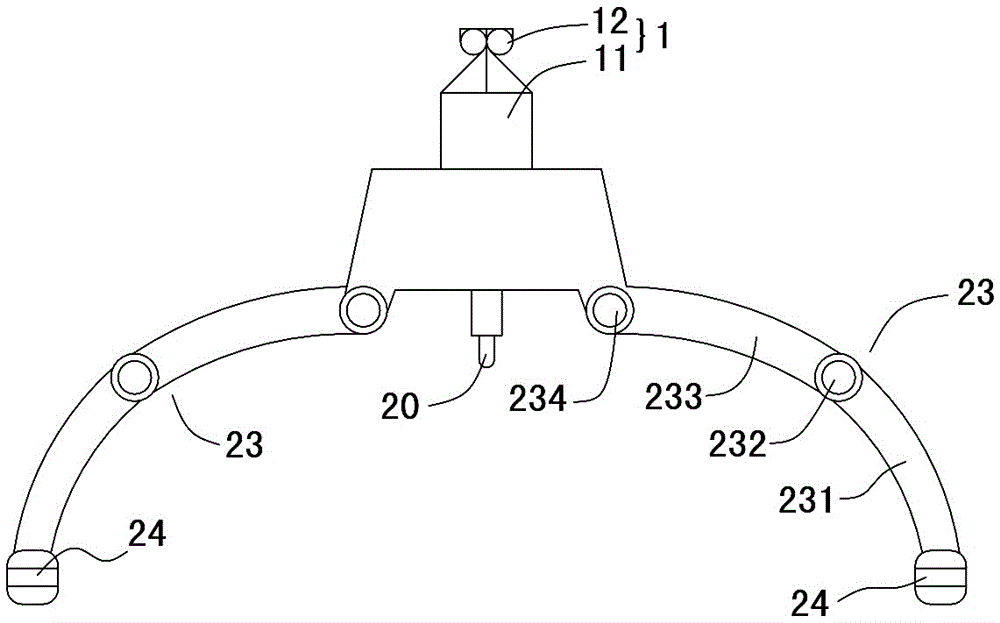
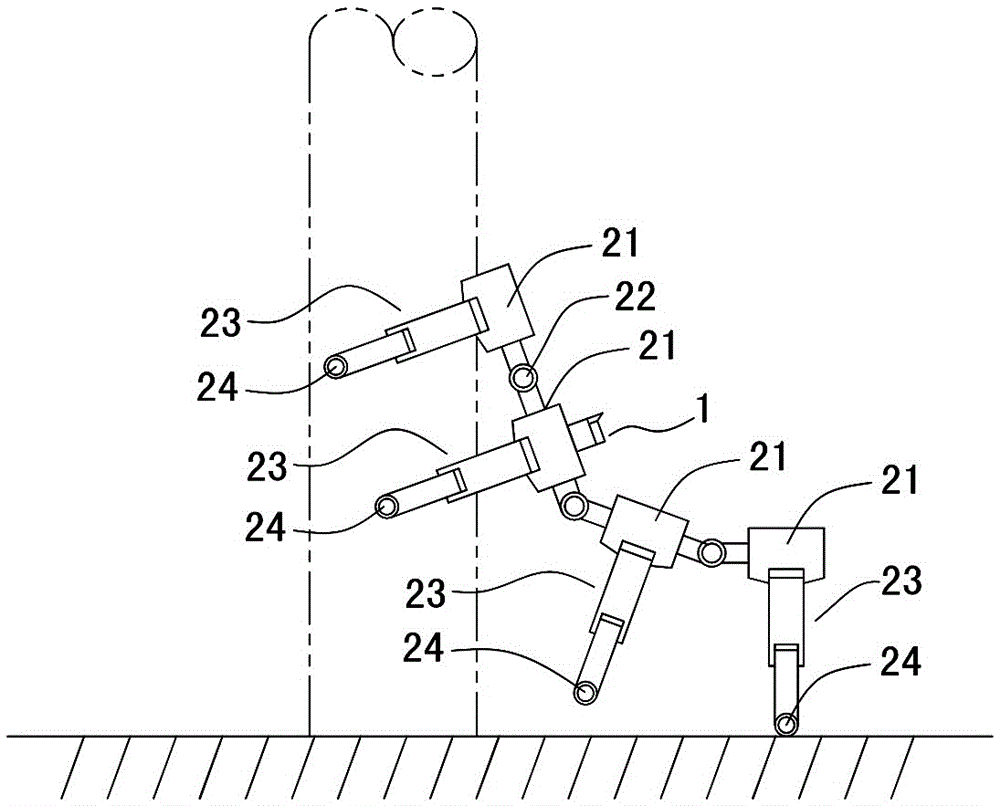
[0031] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 and Figure 6 As shown, the substation inspection robot with pole climbing function in this embodiment includes a monitoring device 1, a drive control module and a crawling mechanism 2. The monitoring device 1 and the drive control module are respectively installed on the crawling mechanism 2. The crawling mechanism 2 includes a multi-section The body unit 21 and the body joint 22 are connected by the body joint 22 between the adjacent body units 21. A body joint motor for controlling the rotation state of the body joint 22 is provided between the adjacent body units 21. The bottom of the body unit 21 is provided with There are bottom wheels 210 and a pair of robot arms 23 for climbing poles and moving. The ends of the robot arms 23 are provided with walking and rotating universal wheels 24 and universal wheels for driving the walking and rotating universal wheels 24 to walk or rotate. The drive mechan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More