

AGV path tracking method
A path tracking and path technology, applied in the directions of road network navigators, measuring devices, instruments, etc., can solve problems such as reducing the efficiency of AGV, and achieve the effect of high travel efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The specific embodiments of the present invention will be described below in conjunction with the accompanying drawings.
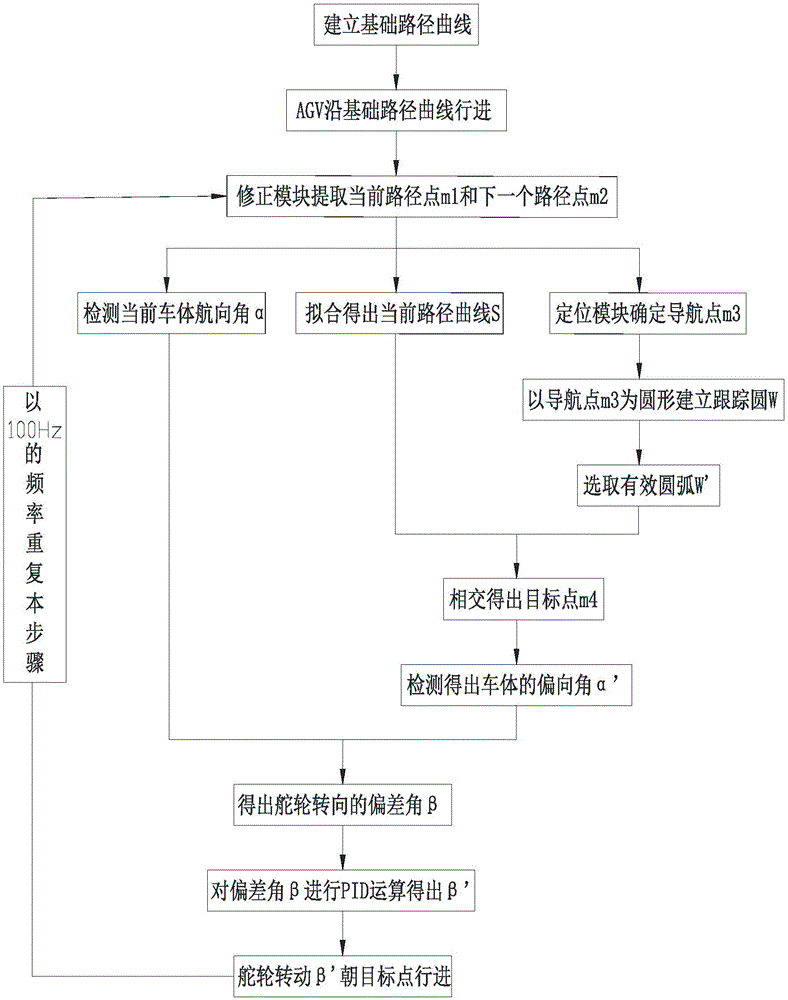
[0028] see Figure 1 to Figure 2 , an AGV path tracking method, comprising the following steps:
[0029] (a) Establish a path map in the navigation device of the AGV, the path map includes several path points a, recorded as a 1 , a 2 ...a n , and the basic path curve obtained by fitting the path point a;
[0030] (b) The driving module in the AGV drives the AGV to advance along the basic path curve;
[0031] (c) The correction module in the AGV extracts the current path point a i and the next waypoint a i+1 , according to the current path point a i and the next waypoint a i+1 Fit the real-time path curve S,i∈[1,n];
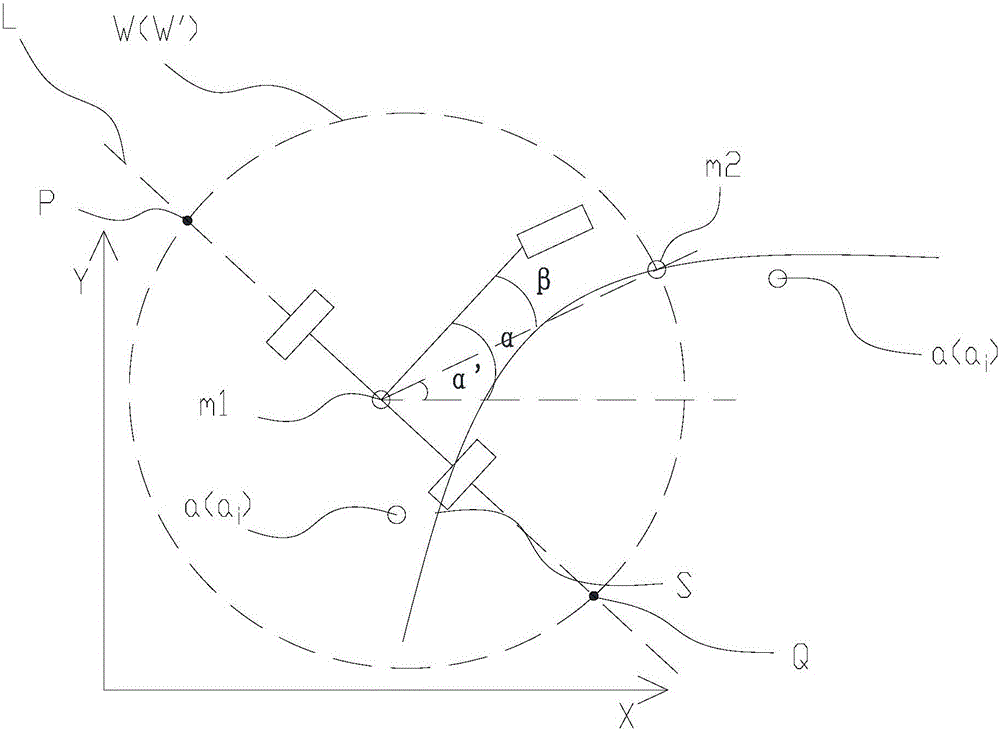
[0032] (d) The positioning module of the AGV determines the current position of the AGV, determines the navigation point m1 with the current position, and establishes a tracking circle W with a radius of R with the navigation p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More