Vehicle-mounted autonomous navigation method based on rotary modulation and virtual odometer
A technology of rotation modulation and navigation method, applied in the field of vehicle navigation, can solve the problems of high cost, low cost, large volume of rotating mechanism and control mechanism, etc., and achieve the effect of eliminating influence and improving navigation accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0037] step 1:
[0038] A group of accelerometers are installed on the vehicle body to measure the acceleration of the vehicle in three directions. The sensitive axes of the three accelerometers are respectively along the horizontal axis of the carrier to the right, forward along the longitudinal axis of the carrier, and upward along the vertical axis of the carrier, namely "Right Front Top" coordinate system.
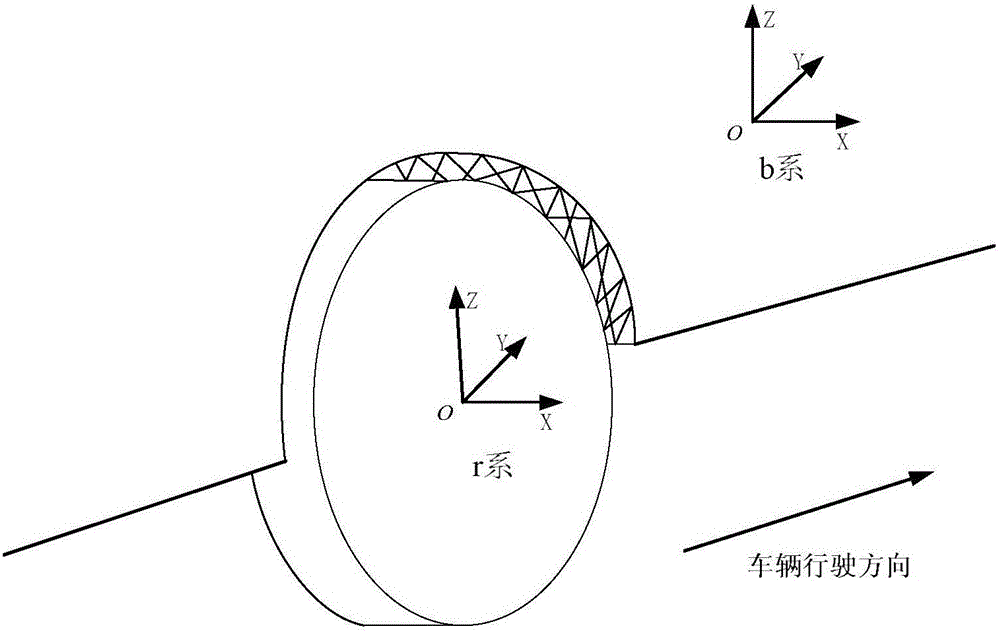
[0039] A MEMSIMU is installed near the wheel rotation axis, including three gyroscopes and three accelerometers. The x-axis of the IMU is parallel to the wheel rotation axis, and the y and z-axes are in the wheel plane, perpendicular to the X-axis respectively, in a right-handed coordinate system.
[0040] Step 2:
[0041] The wheel is used as the rotating mechanism of the MEMS rotary inertial navigation system, considering the in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More