

Two-leg robot leg mechanism based on driving of artificial muscles
A technology of artificial muscles and leg mechanisms, applied in the field of bionic robots, can solve problems such as unnatural walking gait, slow walking speed, and differences in joint drive, and achieve consistent knee posture, strong adaptability to road conditions, and improved foot lifting. height effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
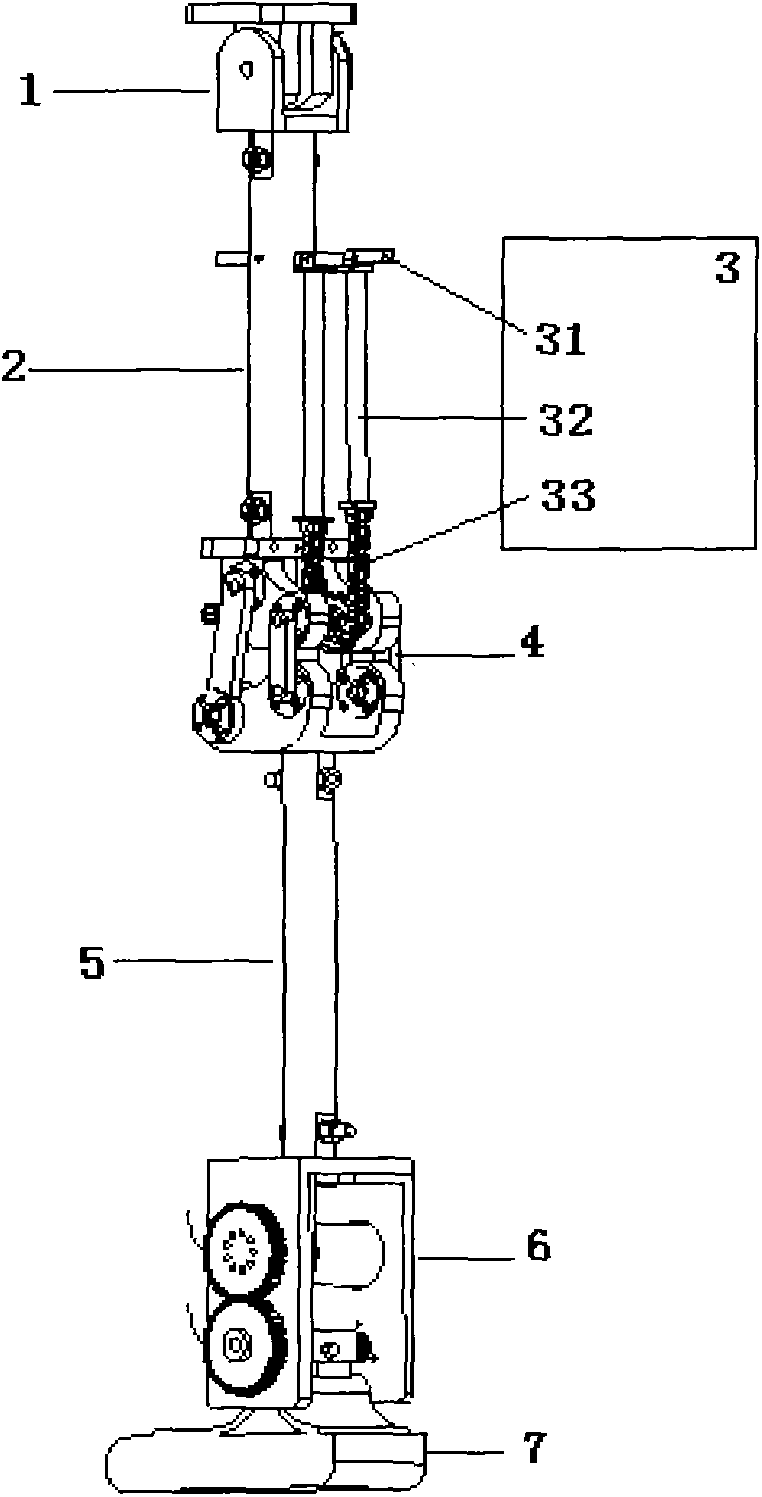
[0034] Such as figure 1 As shown, the leg mechanism based on artificial muscle-driven dual-leg robot includes a single-axis hip joint, a thigh rod, a pneumatic artificial muscle drive mechanism, a bionic knee joint, a calf rod, an ankle joint transmission mechanism and a flexible prosthetic foot; the single-axis The hip joint is connected to the thigh bar shaft, the thigh bar is connected to the bionic knee joint, the bionic knee joint, the calf bar, the ankle joint transmission mechanism and the flexible prosthetic foot are connected in turn, the pneumatic artificial muscle drive mechanism includes a cross bar, and the cross bar is vertically fixed in the thigh bar , two pneumatic artificial muscles are arranged in parallel, one end is fixedly connected to the cross bar, and the other end is interconnected by a chain, and the chain i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More