

A Non-uniformity Correction Method of Infrared Image Based on Scene Frame Registration
A non-uniformity correction and infrared image technology, applied in image enhancement, image data processing, instruments, etc., can solve problems such as image degradation, failure to obtain good image quality, slow convergence rate, etc., to save time, good correction effect, The effect of fast convergence rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
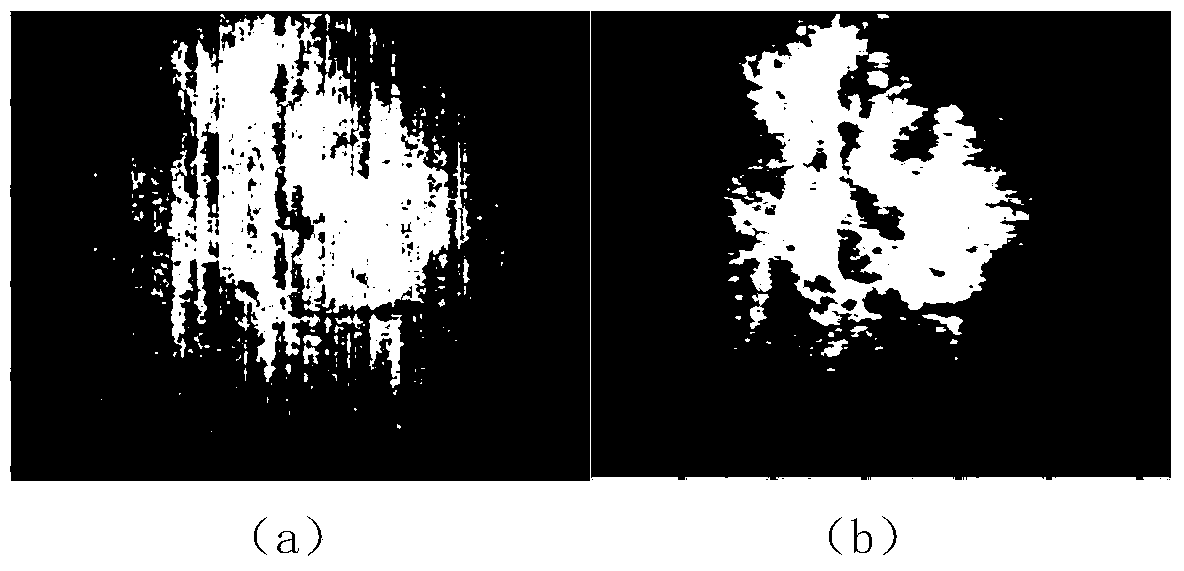
[0056] combine figure 2 , the infrared detector collects the infrared image of the mountain at night at high altitude, and the image size is 320×256;
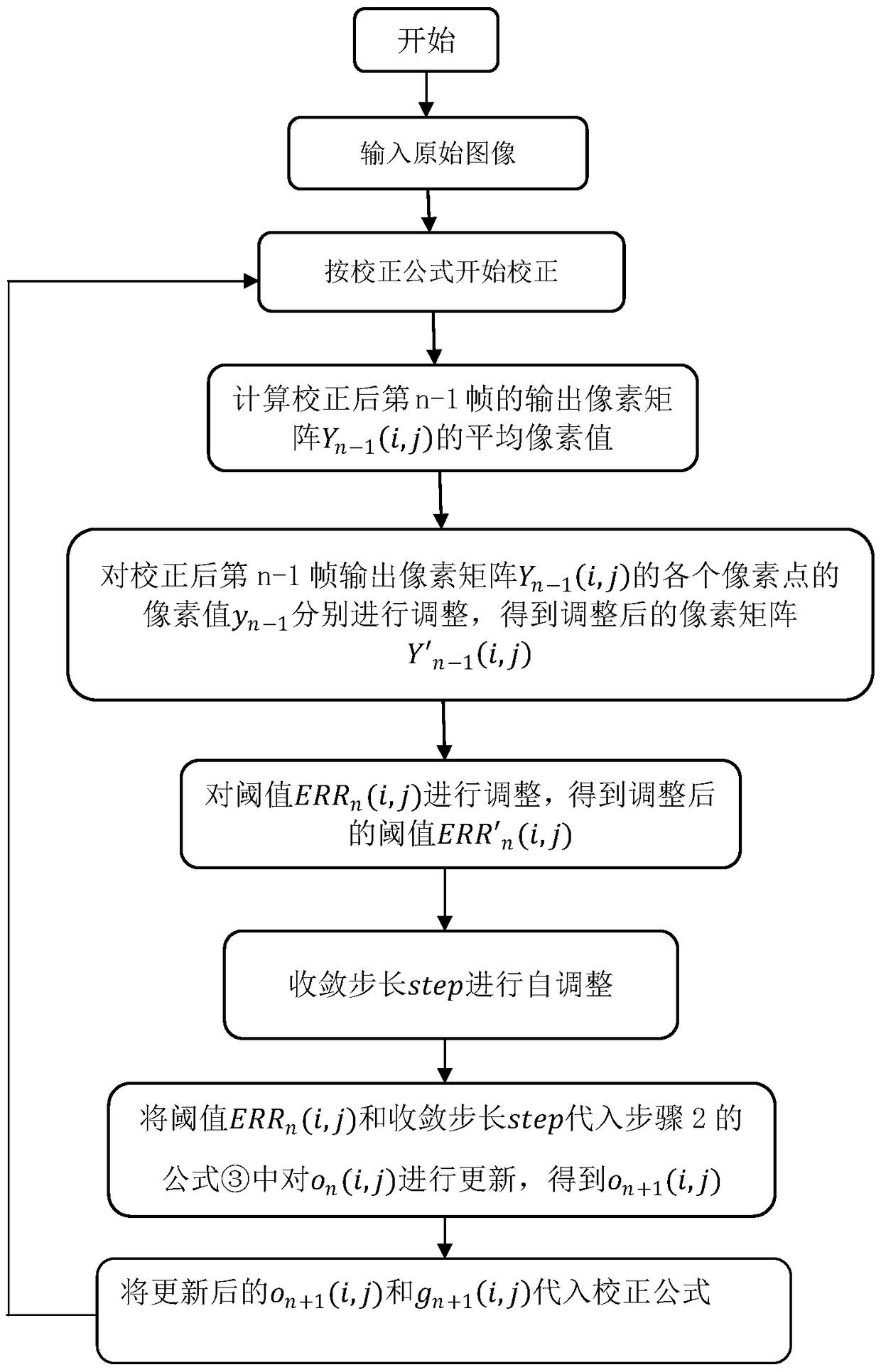
[0057] Step 1. After the original analog image collected by the infrared detector is converted by A / D, the original digital image is obtained;
[0058] Step 2. Correct the original digital image to obtain the output pixel matrix Y of the n-1th frame after correction n-1 (i, j) and the output pixel matrix Y of the nth frame after correction n (i, j), the correction formula is as follows:
[0059]
[0060] Step 3. Determine the output pixel matrix Y of the n-1th frame after the above correction n-1 The average value of (i, j): the output pixel matrix Y of the n-1th frame after statistical correction n-1 (i, j), and find its average average n , n represents the frame number;
[0061] Step 4. Output the pixel matrix Y for the n-1th frame after correction n-1 The pixel value y of each pixel point of (i, j) n-1 Adjust res...
Embodiment 2
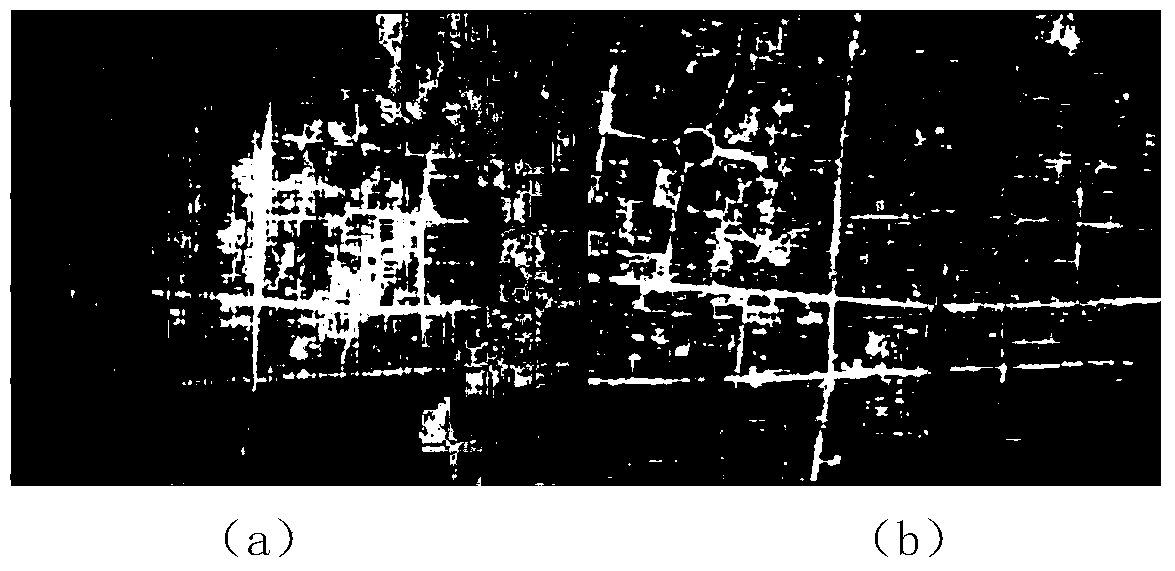
[0080] combine image 3 , the infrared detector collects the infrared image of the overpass shot at night at high altitude, and the image size is 320×256;
[0081] Step 1. After the original analog image collected by the infrared detector is converted by A / D, the original digital image is obtained;
[0082] Step 2. Correct the original digital image to obtain the output pixel matrix Y of the n-1th frame after correction n-1 (i, j) and the output pixel matrix Y of the nth frame after correction n (i, j), the correction formula is as follows:
[0083]
[0084] Step 3. Determine the output pixel matrix Y of the n-1th frame after the above correction n-1The average value of (i, j): the output pixel matrix Y of the n-1th frame after statistical correction n-1 (i, j), and find its average average n , n represents the frame number;
[0085] Step 4. Output the pixel matrix Y for the n-1th frame after correction n-1 The pixel value y of each pixel point of (i, j) n-1 Adjust ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More