

Anti-impact in-series four-freedom-degree human-simulated mechanical foot
A technology with a degree of freedom and a mechanical foot, which is applied in the field of humanoid robots, can solve problems affecting the service life of materials and achieve a simple and reasonable structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
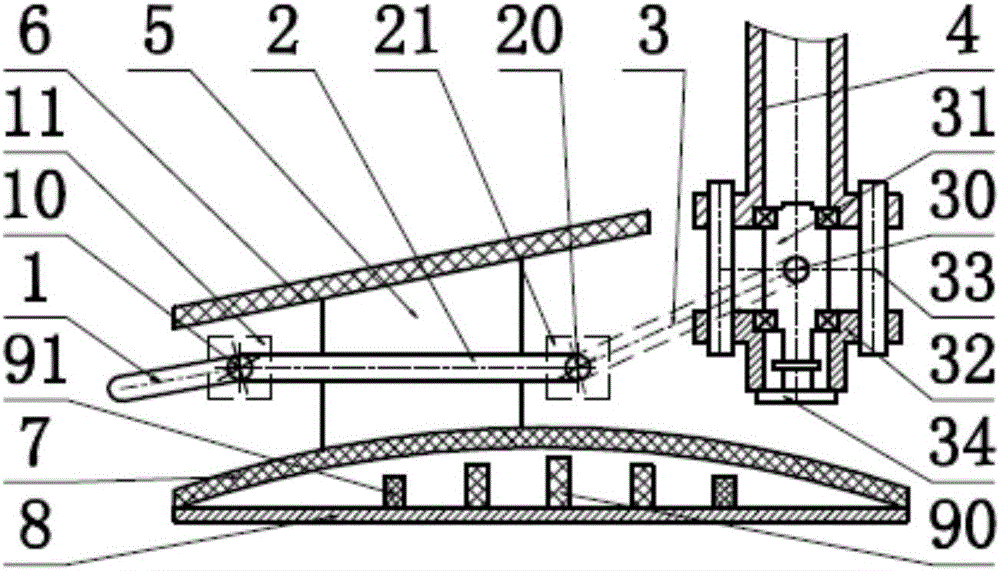
[0013] see figure 1 As shown, the impact-resistant series four-degree-of-freedom humanoid mechanical foot of the present invention includes a sole plate 8, an arched frame 7 mounted on the sole plate 8 shown, a tarsus plate 5 mounted on the arched frame 7, a mounting The metatarsal rod 2 located in the middle of the tarsal plate 5, the toe 1 connected to the left end of the metatarsal rod 2 through the toe shaft 10, the tarsal rod 3 installed on the right end of the metatarsal rod 2 through the tarsal shaft 20, the tarsal rod 3 connected to the Ankle powerplant for Mechanical Shank 4.
[0014] see figure 1 Shown, the top of metatarsal bone plate 5 is equipped with instep plate 6; Toe shaft 10 links to each other with the output shaft of motor A11, and tarsus metatarsal shaft 20 links to each other with the output shaft of motor B21;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More