

Deep space exploration autonomous mission planning method based on constraint satisfiable technology
A technology for autonomous missions and deep space exploration, applied in the aerospace field, can solve problems such as complex constraints, achieve the effects of reducing complexity, overcoming complex constraints, and reducing search space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
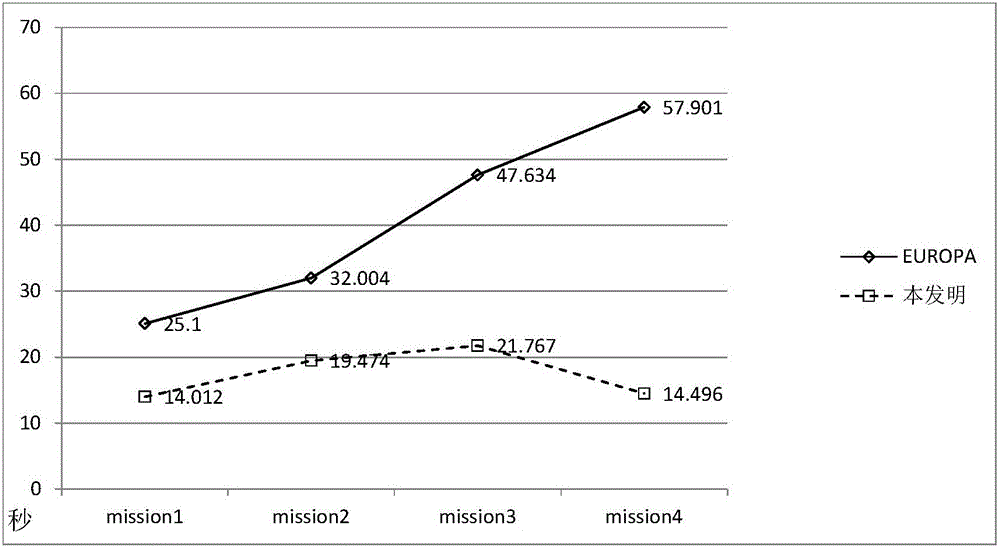
[0041] Embodiment 1 Orbit correction task: Under the conditions described in task 1, the autonomous task planning method of the present invention and the EUROPA autonomous task planning method are respectively used for task planning, illustrating the beneficial effects of the present invention. The stated task 1 conditions are:
[0042] Orbit correction sub-module parameter description and test cases
[0043]
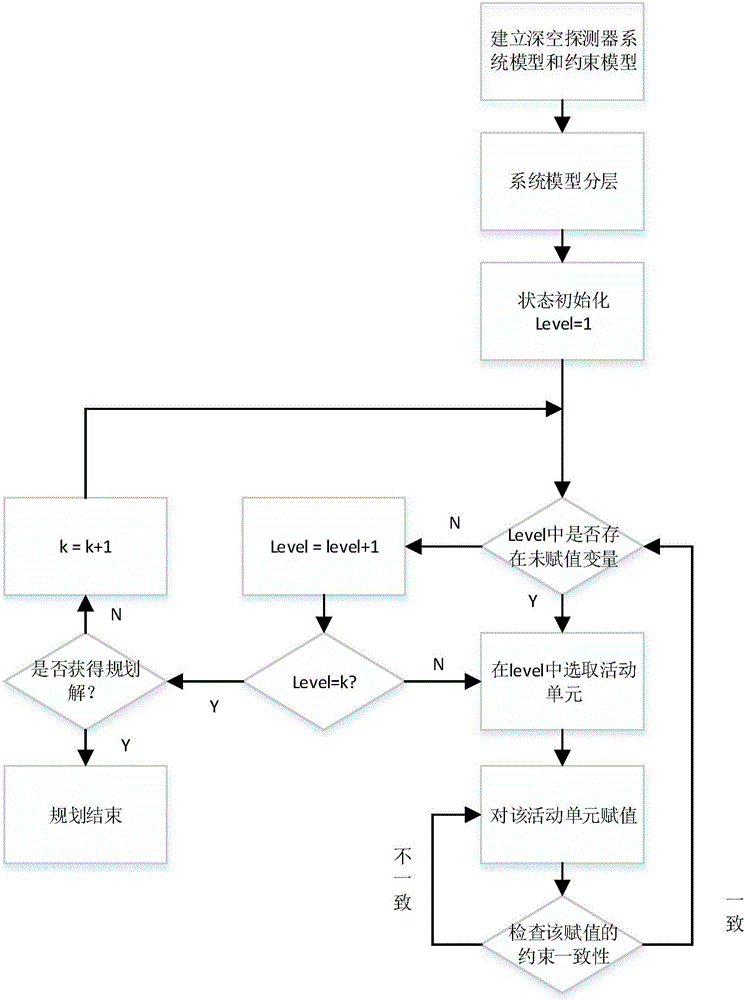
[0044] An autonomous mission planning method for deep space exploration based on constraint satisfiable technology and EUROPA autonomous mission planning method disclosed in this embodiment both include step 1 of establishing a system model of a deep space detector.
[0045] Step 1, establish the system model of the deep space detector.
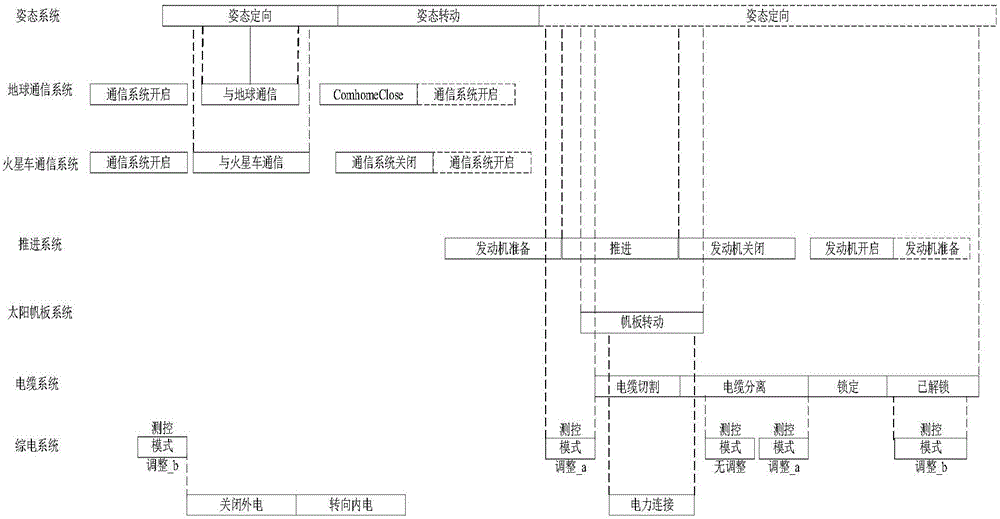
[0046] The specific system model of the orbit correction task is shown in Table 1.
[0047] A deep space exploration autonomous mission planning method based on constraint satisfiable technology disclosed in this embodiment furthe...
Embodiment 2
[0060] Embodiment 2 The task of separating the device and the device: under the conditions described in task 2, the autonomous task planning method of the present invention and the EUROPA autonomous task planning method are respectively used for task planning, illustrating the beneficial effects of the present invention. The stated task 2 conditions are:
[0061] Parameter description and test cases of solving sub-modules at time of device separation
[0062]
[0063] An autonomous mission planning method for deep space exploration based on constraint satisfiable technology and EUROPA autonomous mission planning method disclosed in this embodiment both include step 1 of establishing a system model of a deep space detector.
[0064] Step 1, establish the system model of the deep space detector.
[0065] The specific system model of the device separation task is shown in Table 1.
[0066] A deep space exploration autonomous mission planning method based on constraint satisf...
Embodiment 3
[0080] Embodiment 3 Load switching task: Under the conditions described in Task 3, the autonomous task planning method of the present invention and the EUROPA autonomous task planning method are used for task planning, illustrating the beneficial effects of the present invention. The stated task 3 conditions are:
[0081] Parameter description and test cases of sub-module solution for load switch time
[0082]
[0083] An autonomous mission planning method for deep space exploration based on constraint satisfiable technology and EUROPA autonomous mission planning method disclosed in this embodiment both include step 1 of establishing a system model of a deep space detector.
[0084] Step 1, establish the system model of the deep space detector.
[0085] The specific system model of the device separation task is shown in Table 1.
[0086] A deep space exploration autonomous mission planning method based on constraint satisfiable technology disclosed in this embodiment furt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More