Robot global space positioning method based on graphical labels and camera
A technology of graphic identification and global space, applied in the field of robotics, can solve the problems of inconvenient rearrangement, wear and high installation cost, and achieve the effect of long practical life, easy maintenance, and small site damage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0020] A global space positioning method based on graphic signs and cameras, comprising the steps of:
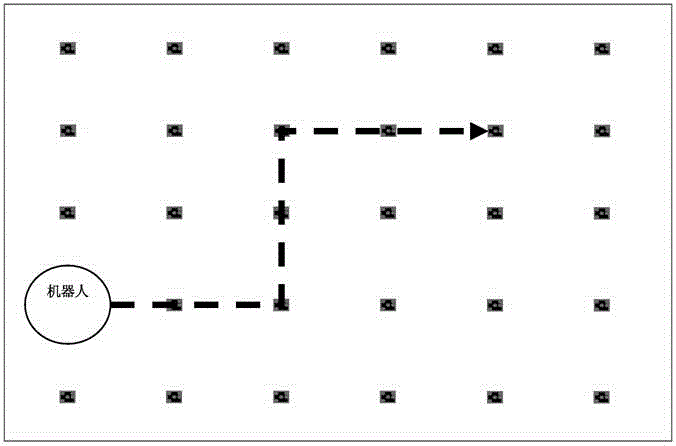
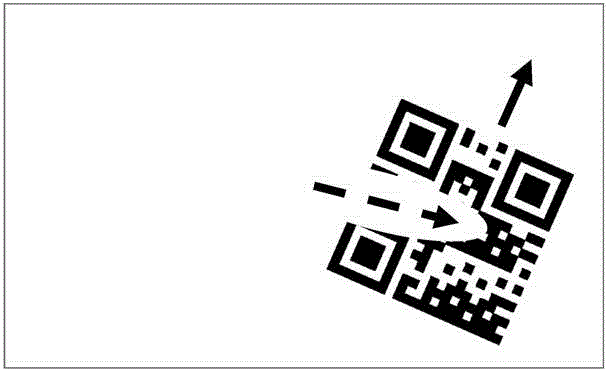
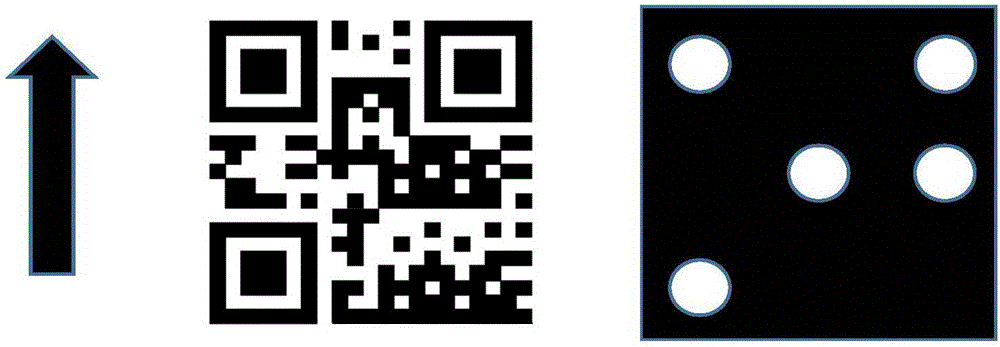
[0021] In the working space of the robot, a graphic marker is laid at intervals; figure 1 As shown, the figure 1 The patterns that can be used as graphic identifiers are listed in : arrows, QR codes, or custom graphics that can identify directions. From the above-mentioned graphic markers, we can read the direction, position and content of the markers as the basis for positioning.
[0022] The processor sets the action path of the robot, so that the robot can observe the graphical marker throu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com