

Control method of lower extremity exoskeleton robot using airbag sensor
A technology of exoskeleton robot and airbag sensor, which is applied in the direction of equipment to help people walk, physical therapy, etc., can solve problems such as difficult to meet core needs, and achieve the effect of reducing the sense of drag, not easy to fall off, and reducing pain
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
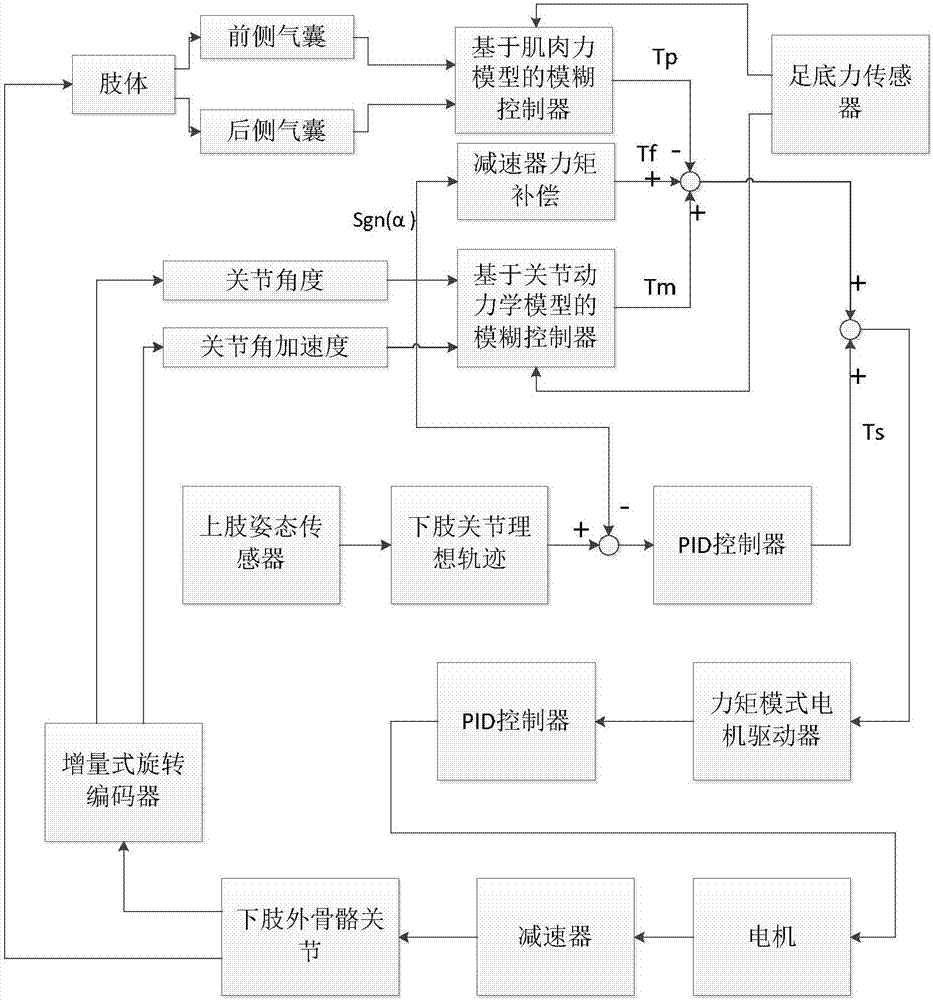
[0030] figure 1 It is the control block diagram of the present invention. The control method for a full-lower extremity exoskeleton robot according to the present invention includes the following sensors: incremental encoders distributed at the knee joints and ankle joints of the exoskeleton; thin film pressure sensors located at the sole of the exoskeleton robot; The air bag pressure sensor in the front and rear of the calf muscles of the human body; the attitude sensor connected to the human arm. Acquisition and calculation of joint motion angle and angular velocity by incremental rotary encoder; acquisition of human-ground contact force by plantar force sensor; measurement of contact force between human and exoskeleton robot by airbag sensor; measurement of human arm swing angle and angular velocity by attitude sensor .
[0031] Micro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More