

A Architectural Decoration Support Robot Based on Three-DOF Parallel Mechanism
A technology for architectural decoration and robotics, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of non-adjustable fixed angle, non-adjustable rotation angle, poor rigid support performance, etc., and achieve good equipment stability and shock absorption The effect of good performance and large carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
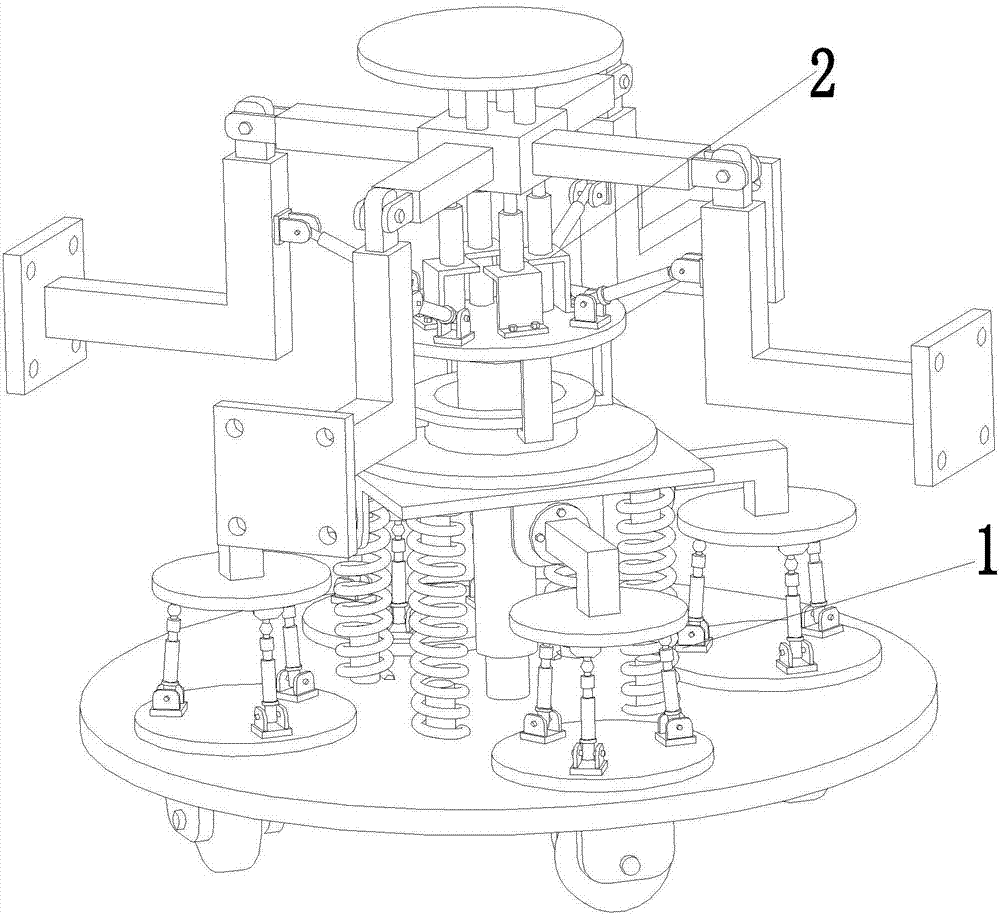
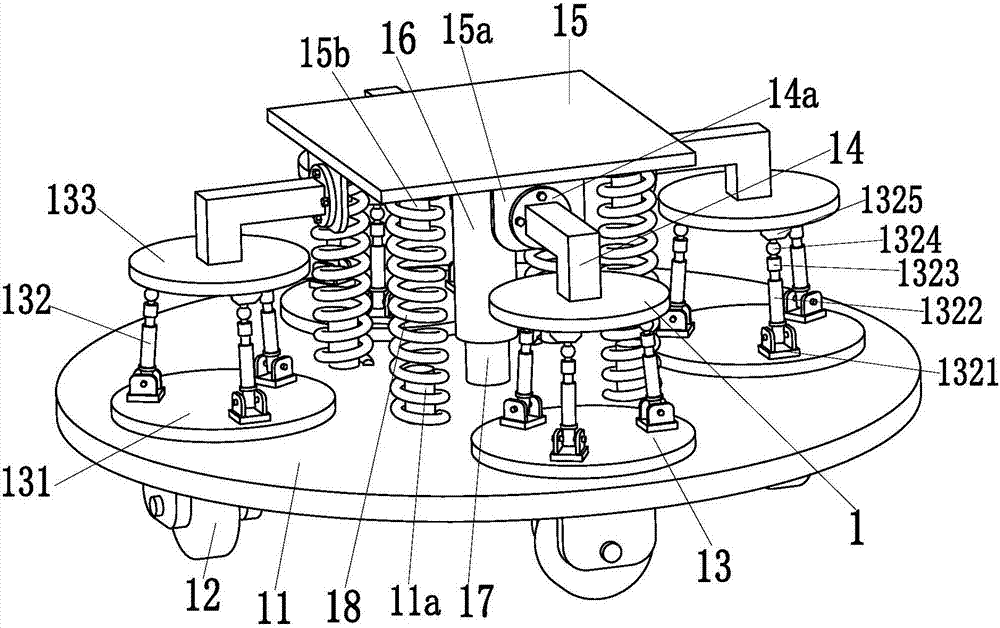
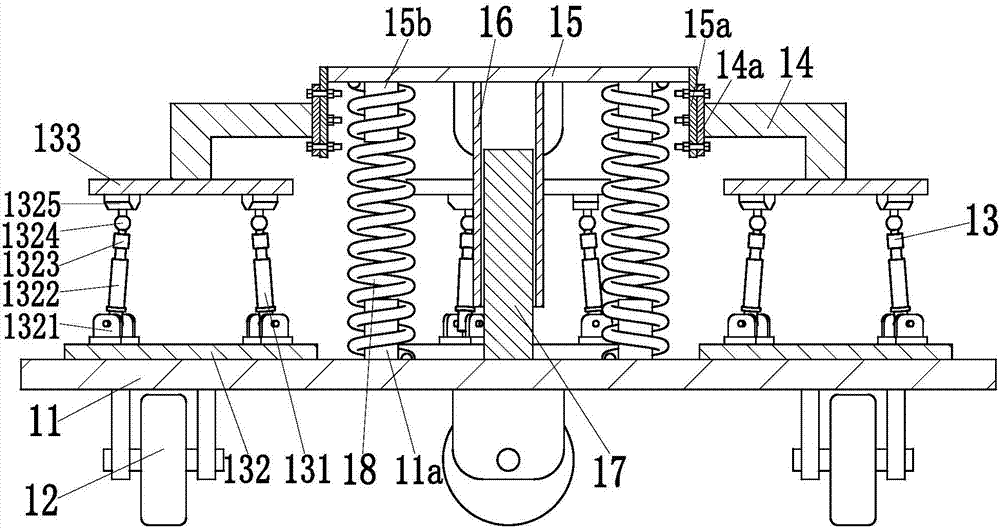
[0019] Such as Figure 1 to Figure 5 As shown, a building decoration support robot based on a three-degree-of-freedom parallel mechanism includes a self-stabilizing support device 1. The self-stabilizing support device 1 has good rigid support performance, stability and shock absorption performance. The self-stabilizing support device 1 A locking adjustment device 2 is installed in the middle of the upper end surface, and the fixing angle and rotation angle of the locking adjustment device 2 are adjustable. The self-stabilizing support device 1 includes a fixed round platform 11, and four symmetrically arranged four universal wheels 12, the present invention moves the present invention to the required cleaning place of the indoor building throug...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More