

An obstacle avoidance spraying robot
A spraying robot and obstacle avoidance technology, which is applied in the direction of manipulators, spraying devices, program control manipulators, etc., can solve problems such as spraying and complex structures, and achieve the effects of uniform distribution, improved filtration efficiency, and increased degrees of freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Describe the technical scheme of the present invention in detail below in conjunction with accompanying drawing:
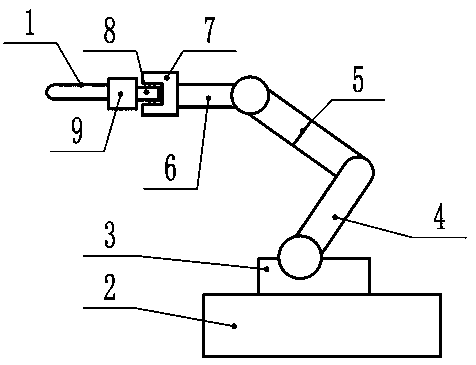
[0023] like figure 1 , an obstacle avoidance spraying robot, comprising a base 2, a waist 3 that is installed above the base 2 and can rotate horizontally relative to the base 2, a large arm 4 that is connected to the waist 3 at the bottom and can pitch and rotate relative to the waist 3, a lower end and a large arm 4. The top of the arm 4 is connected to the middle arm 5 and can be tilted and rotated relative to the big arm 4. The rear end is connected to the upper end of the middle arm 5 and can be tilted and rotated relative to the middle arm 5. The wrist 7, which is connected and can be rotated relative to the forearm 6, the rear end is connected to the front end of the wrist 7 and can be rotated relative to the wrist 7, and the hand 8 and the rear end are connected to the front end of the hand 8 and can be relative to the hand. The end 9 of the rotati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More