

Multi-vehicle cooperative exploration method and device via environment segmentation
An exploration device and multi-vehicle technology, applied in the field of multi-vehicle collaborative exploration methods and devices, can solve problems such as reducing the overall performance of the system and vehicles interfering with each other, reducing repetition and improving efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
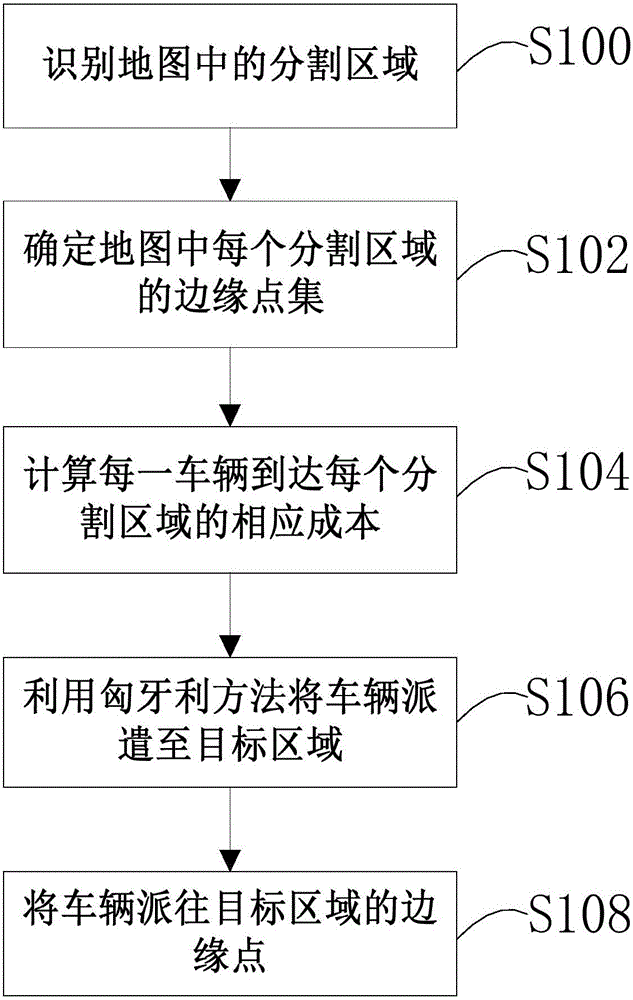
[0030] In order to describe in detail the technical content, structural features, achieved objectives and effects of the technical solution, the following detailed descriptions are given in conjunction with specific embodiments and accompanying drawings.
[0031] 1 Overview
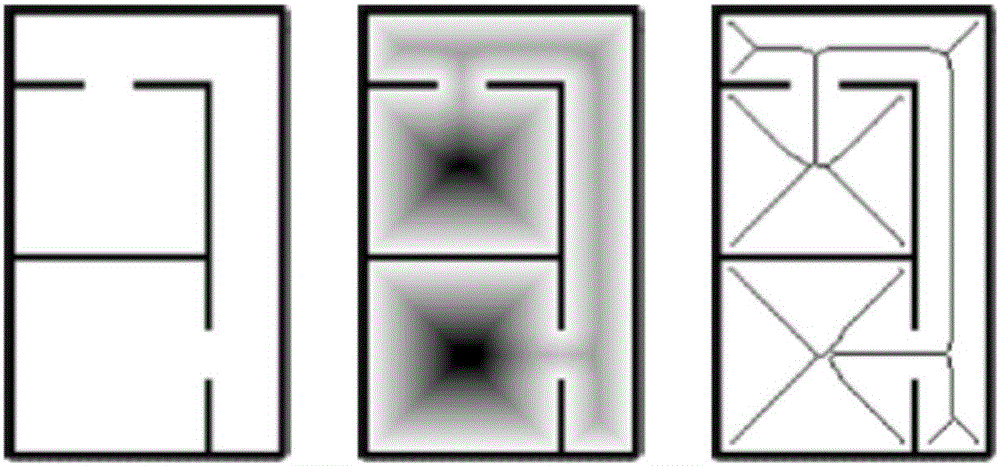
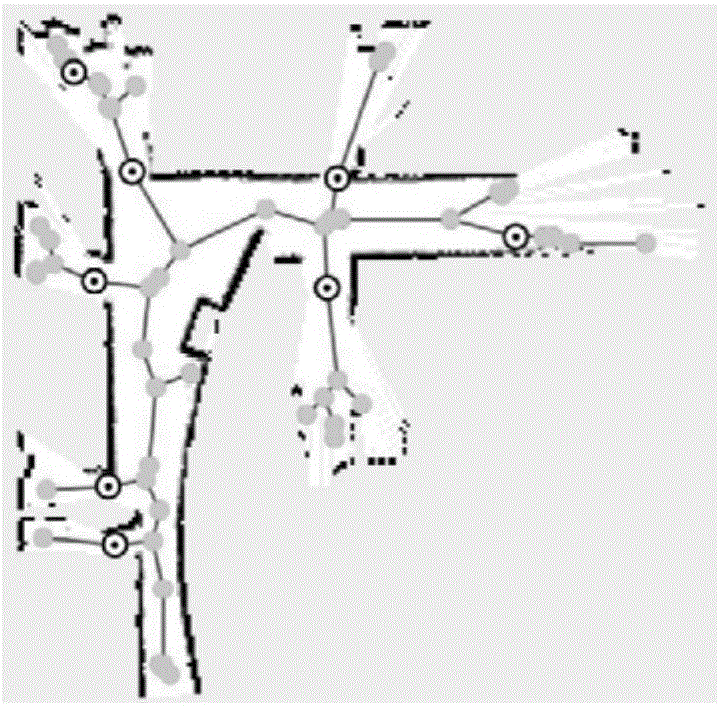
[0032] The present invention considers how to use the multi-vehicle system to efficiently explore the environment, thereby minimizing the time required to complete the exploration. The environment exploration task of the multi-vehicle map can be roughly divided into two subtasks. First, the system must be able to identify potential exploration targets. Then, the system must be able to dispatch each independent vehicle to the target position calculated in the previous step.
[0033] B.Yamauchi once proposed a more popular potential exploration target recognition method, which uses the concept of frontiercells, and these edge cells are potential exploration target locations. An edge cell itself is known, in oth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More