

Four-foot walking robot
A walking robot and quadrilateral mechanism technology, applied in the field of robotics, can solve problems such as large self-weight/load ratio, small self-weight/load ratio, and complex control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
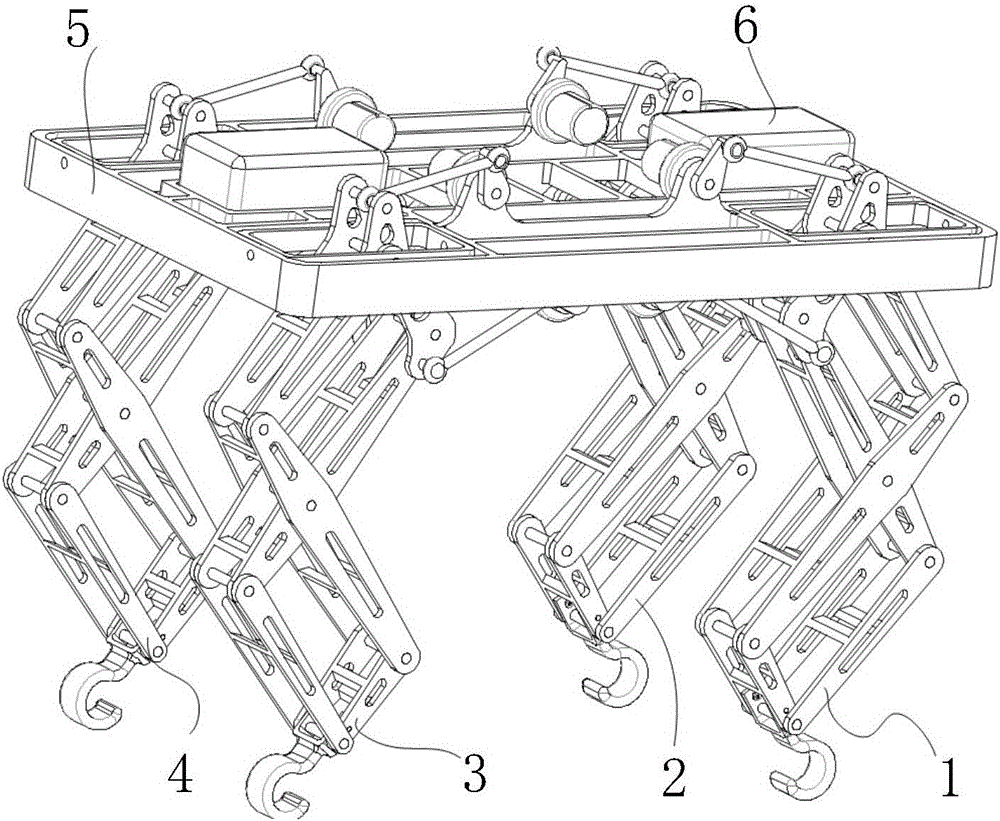
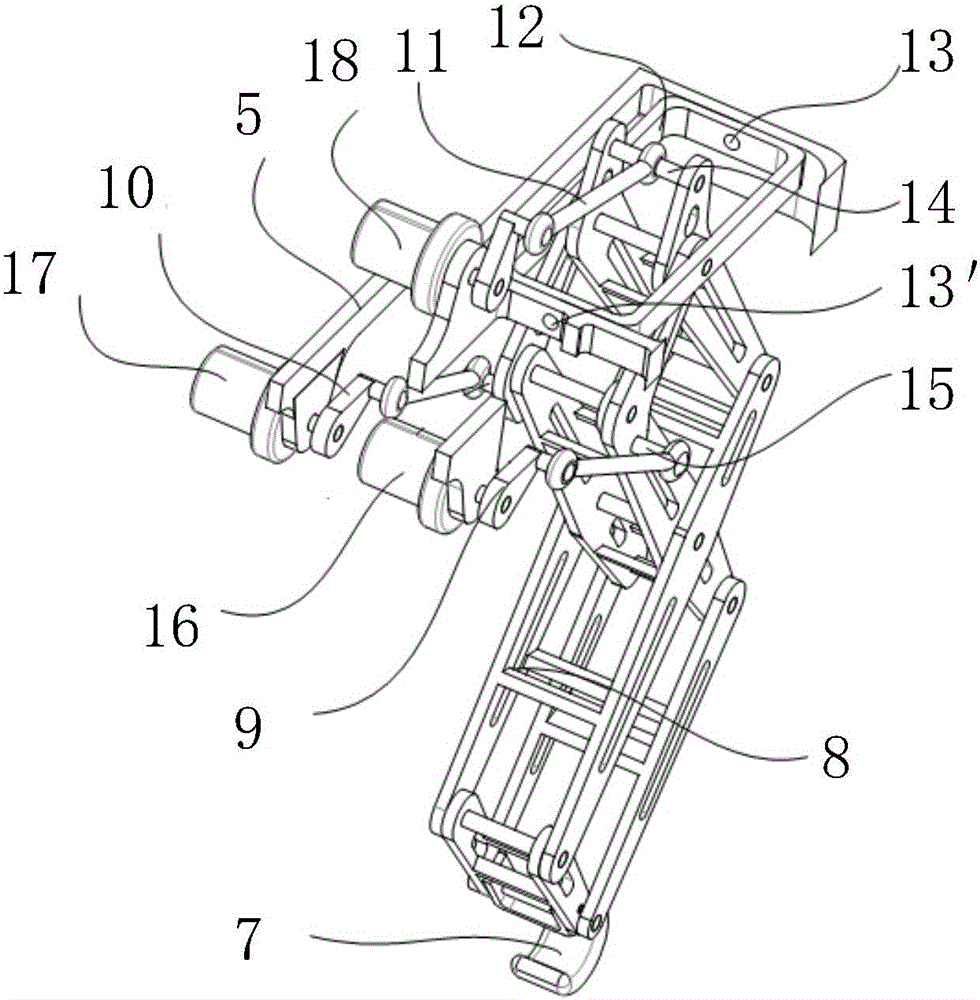
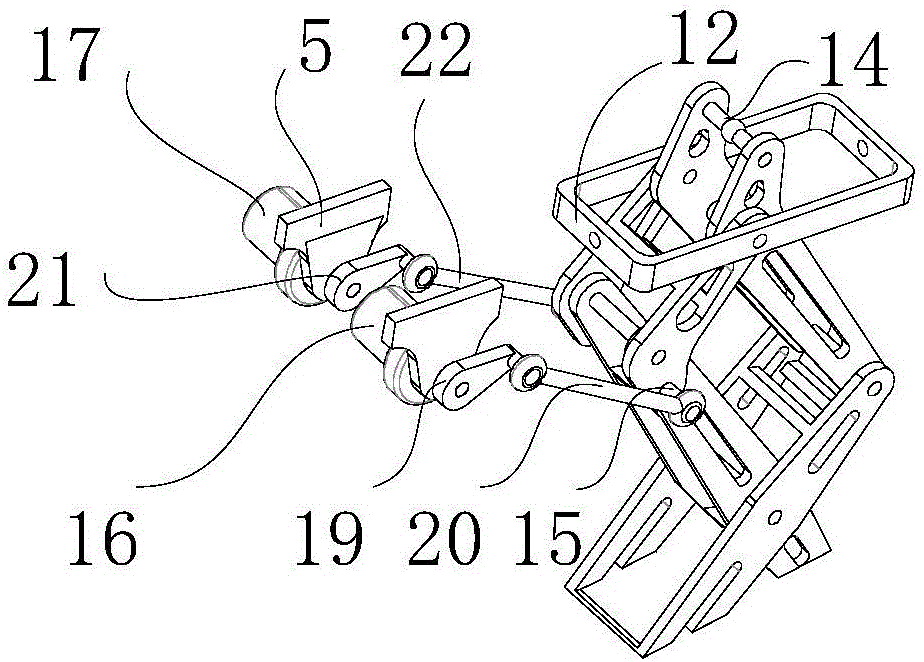
[0018] in figure 1 In the schematic diagram of the quadruped walking robot shown, four mechanical legs 1, 2, 3, 4 with the same structure are respectively connected to the four corners of the frame 5 by rotating shafts, and the electrical unit 6 is fixed on the top of the frame The frame is provided with through holes to connect with the mechanical legs and reduce its own weight, and the rotating shafts connected to the frame are arranged parallel to each other; Figure 2-Figure 6 As shown, each of the mechanical legs mainly includes a rectangular ring, a double parallelogram mechanism, an elastic toe, and a parallel connection between the frame and the double parallelogram mechanism through a servo motor body and a ball pair. Three drive branches with the same structure, wherein, in the mechanical leg, a set of opposite sides of the rectangular ring-shaped member 12 are connected to one corner of the frame through a pair of first rotating shafts 13, and the other of the rectang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More