Automatic collision preventing control method of USV
A collision avoidance and controller technology, which is applied in the field of marine search and rescue and survey, can solve problems such as mutual cooperation and cooperation that are rarely involved, and achieve the effects of ensuring safety, reducing workload, and improving intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
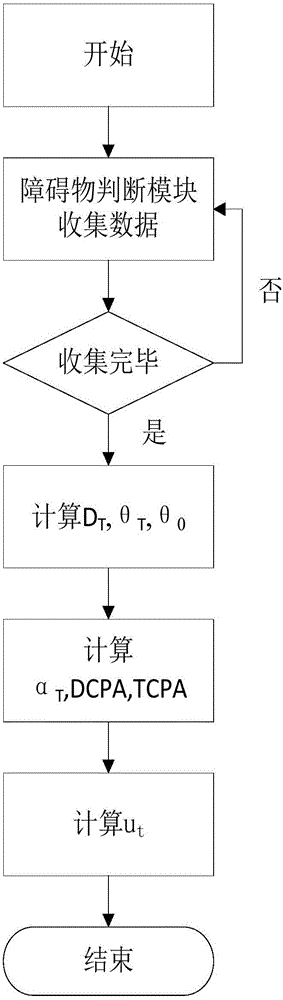
[0023] DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENT 1. A method for USV autonomous collision avoidance control described in this embodiment is carried out according to the following steps:
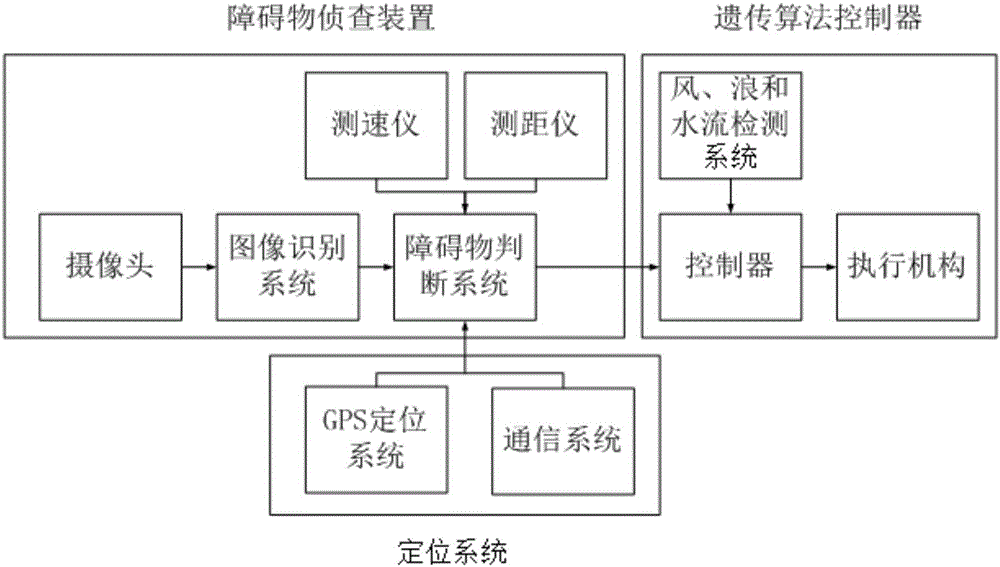
[0024] 1. The camera will take pictures of the environment within a 360° range centered on the unmanned boat, and transmit the image information to the image recognition system;
[0025] 2. The image recognition system processes the image information and transmits the suspected obstacle information to the obstacle judgment system. At the same time, the rangefinder measures the distance between the obstacle and the unmanned boat within 500 meters of the unmanned boat, and transmits the information to the Obstacle judgment system;
[0026] 3. The GPS positioning system locates the current position of the unmanned boat in real time, the communication system establishes contact with other unmanned boats, and obtains the relative position information of the boat and other unmanned boats, an...
specific Embodiment approach 2
[0034] Specific Embodiment 2. This embodiment is a further description of the USV autonomous collision avoidance control method described in Specific Embodiment 1. The acquisition period of the shooting environment image described in step 1 is 0.05s, and 10 images are collected each time. cycle, taking a total of 0.5s.
specific Embodiment approach 3
[0035] Embodiment 3. This embodiment is a further description of the USV autonomous collision avoidance control method described in Embodiment 1 or 2. The measurement period of the rangefinder in step 2 is 0.5s.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



