

Thumb two-head joint detecting device
A detection device and thumb technology, applied in the field of data gloves, can solve the problems of expensive data gloves, complex systems, and difficult maintenance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
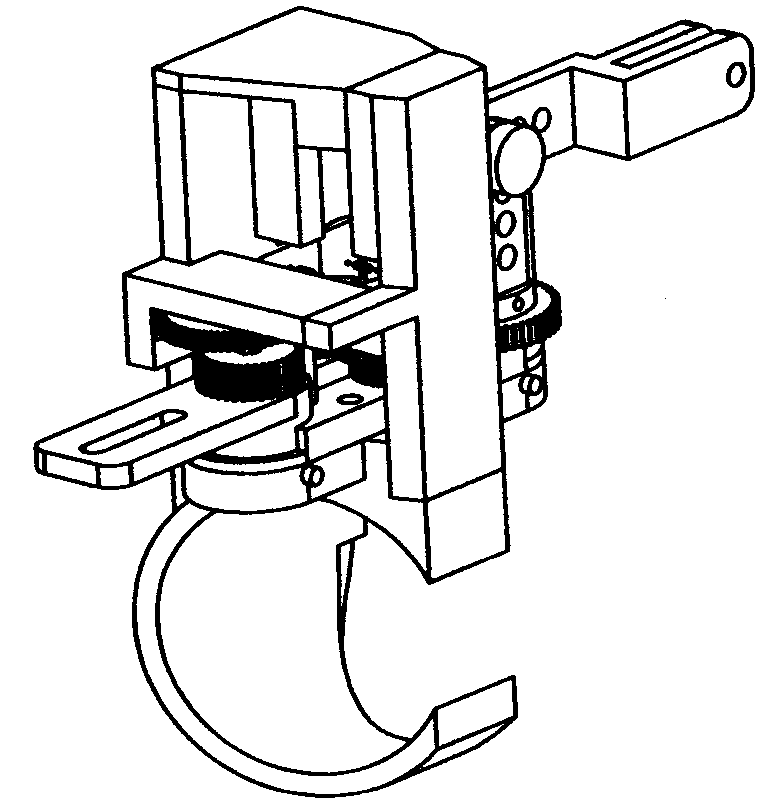
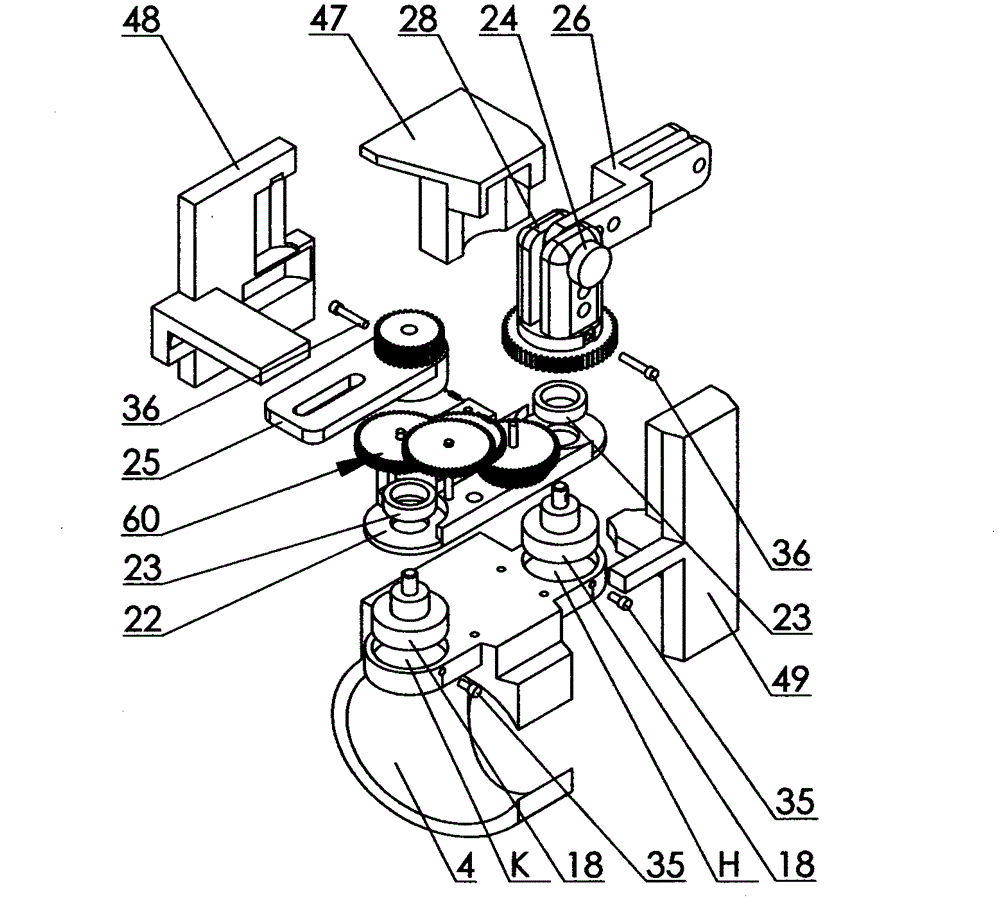
[0006] Specific implementation mode one: as figure 1 with figure 2 As shown, the thumb double head joint detection device includes a thumb proximal knuckle base 4 , an angle sensor 18 , a rocker arm 19 , and a ball head 20 . The thumb proximal knuckle base 4 is fixed on the thumb proximal knuckle part of the human hand, the thumb proximal knuckle base 4 half surrounds the thumb proximal knuckle, the cross section surrounding the junction is "C" shape, and the opening faces the front of the palm On one side, there are two hole seats H and K at the position of the base on the outer surface of the proximal knuckle of the thumb, and the positions of the two hole seats correspond to the metacarpophalangeal joint (MP) and interphalangeal joint (DIP) of the thumb respectively . Thumb proximal knuckle base 4 and thumb metacarpophalangeal base 5 are hinged by rocking arm 28, connecting rod 26, rocking arm 27, and the bottom of said rocking arm 28 (embedded bearing 23) and the shaft ...
specific Embodiment approach 2
[0007] Specific implementation mode two: as figure 1 with figure 2 As shown, the other end of the rocking arm 25 (embedded bearing 23) is affixed to the shaft of the angle sensor 18 through a screw 36, and the angle sensor 18 is fixed on the thumb proximal knuckle base 4 by the gear box base 22 and the screw 35. In the hole seat K, the gear shaft center on the rocker arm 25 coincides with the shaft center of the rocker arm rotation. Action implementation process: when the interphalangeal joint (DIP) of the operator's thumb is flexing and extending, the rocker arm 25 is driven to rotate, so that the angle sensor 18 linked with the rocker arm 25 in the hole seat K can measure the interphalangeal joint of the operator's thumb. (DIP) Angle and state of flexion and extension.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More