

Unmanned aerial vehicle operating parameter automatic acquisition system and automatic sensing method
A technology of automatic collection of operating parameters, applied in the direction of measuring devices, instruments, surveying and navigation, etc., can solve the problems of large visual errors in observation, failure to collect valid data, and affect data processing, so as to avoid errors and ensure scientific significance. The effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
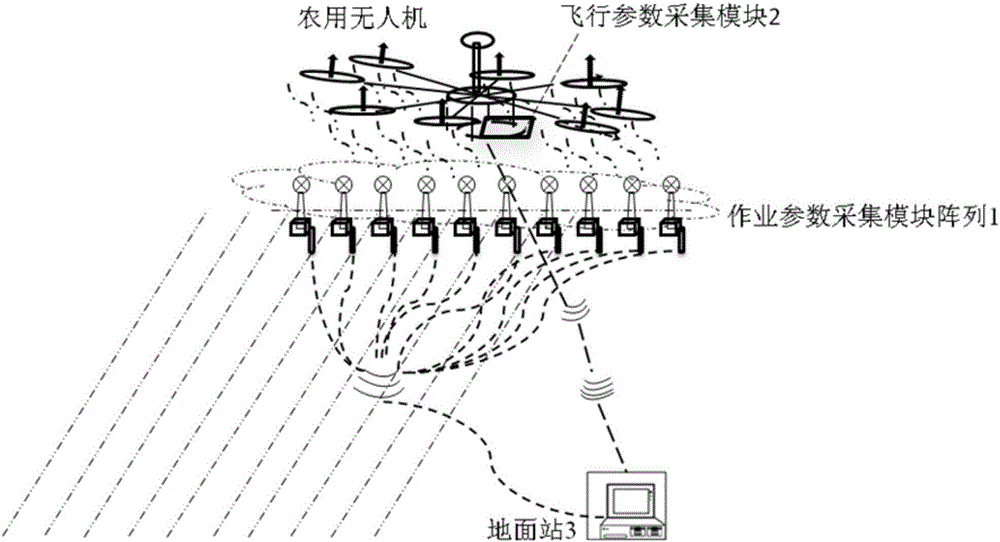
[0035] see figure 1 , the UAV operation parameter automatic acquisition system described in the present embodiment, comprises operation parameter acquisition module array 1, flight parameter acquisition module 2, ground station 3, and the automatic operation operation module is installed on the ground station 3, and the user can pass this module Perform parameter setting, display and other operations. Each module is described in detail below.
[0036]The operation parameter collection module array 1 is used to collect ground parameters and air parameters during UAV operation. Including various sensors for detecting the effect of UAV operation canopy, such as fog drop detection, canopy wind field detection, etc. It also includes various sensors to detect the aerial effects of drone operations. The location of the sensor in the field can be at or below the canopy, and can also be located above the canopy or suspended at the body of the UAV, so as not to affect the flight stat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More