

Control method and device of mechanical arm for quickly approaching to solar panel
A technology for a solar cell panel and a control method, which is applied to the cleaning method using tools, the cleaning method using liquid, and the manipulator, etc., can solve the problems of impracticality, high site construction requirements, and high supporting costs, so as to improve the light energy. Conversion efficiency, efficient cleaning effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0024] Embodiment 1 of the present invention: a control method for a mechanical arm quickly approaching a solar panel, comprising the following steps:
[0025] S1: Detect the distance between the cleaning arm and the solar panel, if the distance between the cleaning arm and the solar panel is greater than a predetermined value, adjust the position of the cleaning arm so that the distance between the two is less than or equal to the predetermined value; If the distance between the solar panels is less than or equal to the predetermined value, proceed to step S2; the distance between the cleaning arm and the solar panels should be controlled within an appropriate range for normal cleaning. If it is too close, it will easily damage the photovoltaic panel, and if it is too far away, the cleaning effect cannot be guaranteed;
[0026] S2: Adjust the angle of the cleaning arm so that the cleaning arm is parallel to the solar panel;
[0027] S3: Adjust the height of the cleaning arm ...
Embodiment 2
[0028] Embodiment 2: a kind of control method that the mechanical arm is close to the solar cell panel rapidly, comprises the following steps:
[0029] S1: Detect the distance between the cleaning arm and the solar panel, if the distance between the cleaning arm and the solar panel is greater than a predetermined value, adjust the position of the cleaning arm so that the distance between the two is less than or equal to the predetermined value; If the distance between the solar panels is less than or equal to the predetermined value, proceed to step S2; the distance between the cleaning arm and the solar panels should be controlled within an appropriate range for normal cleaning. If it is too close, it will easily damage the photovoltaic panel, and if it is too far away, the cleaning effect cannot be guaranteed;
[0030] S2: Adjust the height of the cleaning arm so that it will not interfere with the solar panel when rotating along the vertical axis; adjust the angle between t...
Embodiment 3
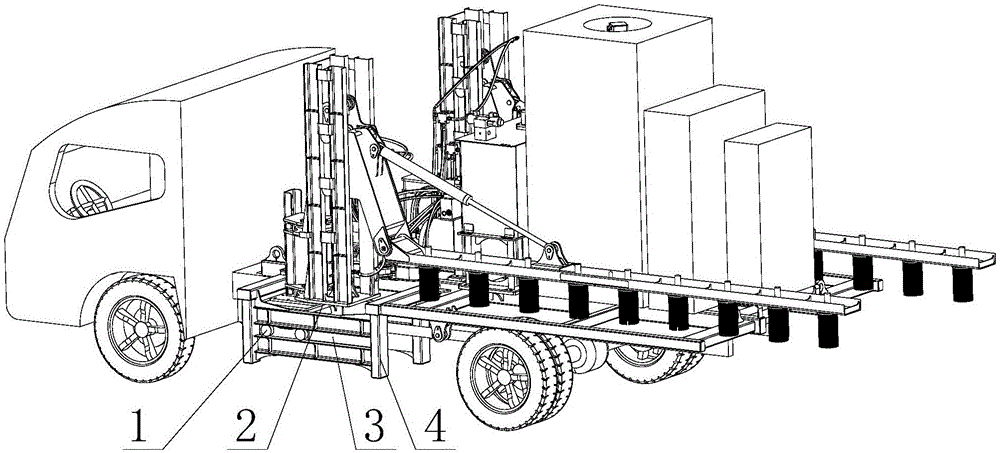
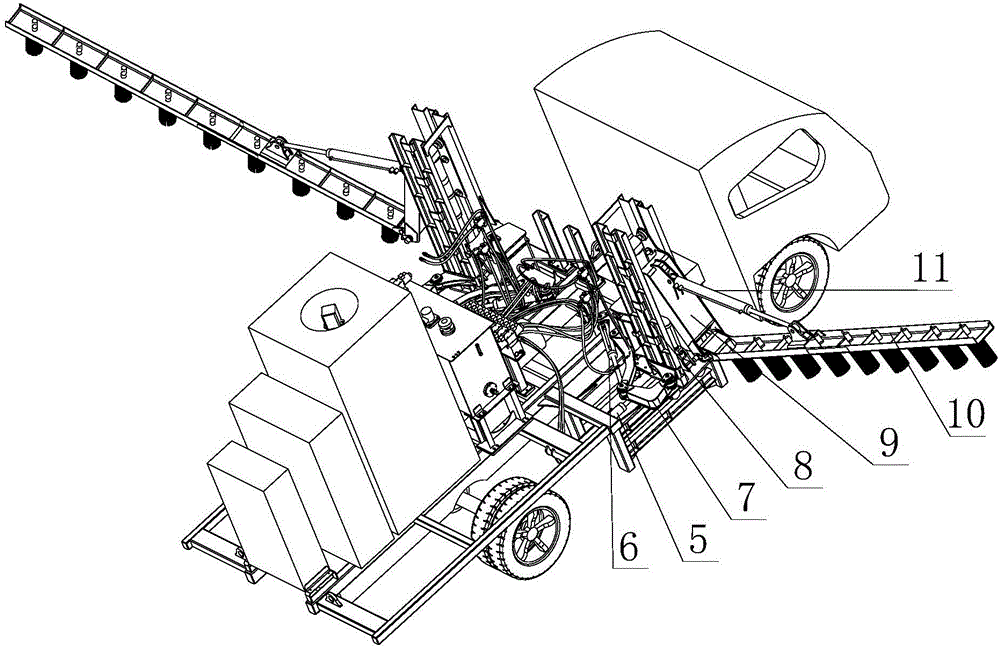
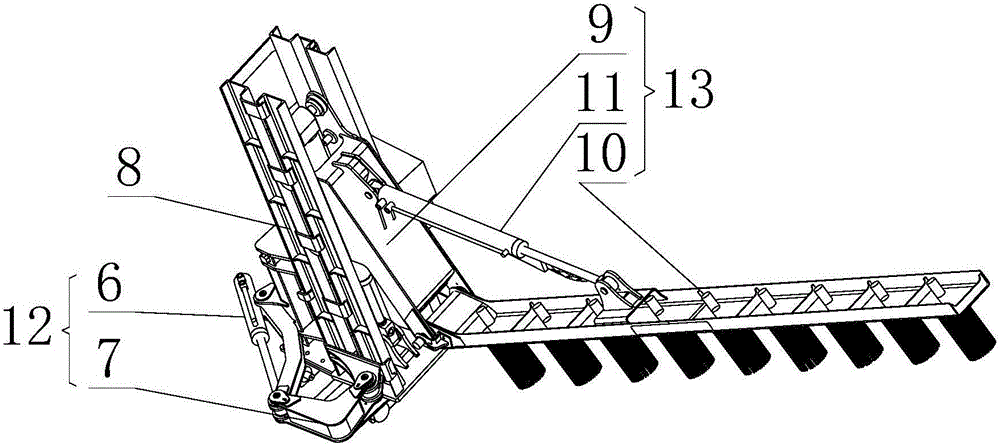
[0032] Embodiment 3: as figure 1 , figure 2 and image 3 As shown, a device for realizing the control method of the mechanical arm described in the above embodiment quickly approaching the solar panel, including a support frame 4, a translation assembly 2 and a cleaning arm 13, and the cleaning arm 13 is installed on the translation assembly 2; the support frame 4 is provided with a sliding track 3, a pulley 1 is installed on the translation assembly 2, and the pulley 1 is matched with the sliding track 3; it also includes a first telescopic device 5, one end of the first telescopic device 5 is fixedly connected with the support frame 4, and the other end It is fixedly connected with the translation assembly 2. The translation assembly 2 can drive the cleaning arm 13 to repeatedly move back and forth within the path limited by the sliding track 3 under the action of the first telescopic device 5, and replace the movement of the vehicle body by the translation assembly 2 whe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More