

High-efficiency intelligent mechanical arm and working method thereof
A robotic arm and high-efficiency technology, applied in the field of manufacturing, can solve the problems of idle resources, waste, affecting the work efficiency of the robotic arm and enterprise production efficiency, and achieve the effect of reducing the moving process, improving production efficiency, and reducing investment in production equipment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
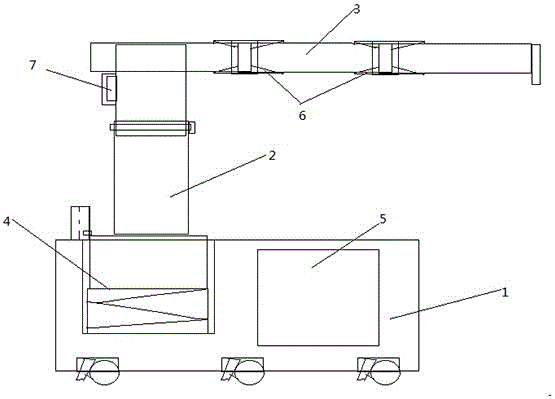
[0039] Such as figure 1 A highly efficient intelligent mechanical arm shown includes: a base 1, a column 2, a mechanical arm 3 and a control device 5, and the rotating mechanism 4 is composed of a rotating shaft, a lifting platform and a limit plate;
[0040] The relationship between the above components is as follows:
[0041] The column 2 is connected to the base 1 through the rotating mechanism 4, the rotating shaft is arranged in the mounting hole, the lifting table is arranged below the rotating shaft, the limiting plate is arranged on the base 1, and , which is matched with the rotating shaft; the mechanical arm 3 is connected with the column 2 through a connector, the control device 5 is arranged in the base 1, and the base 1, the column 2 and the mechanical arm 3 are all connected with the control device 5 connection; the base 1 is provided with a mounting hole for installing the rotating mechanism 4, and the rotating mechanism 4 is connected with the control device 5...
Embodiment 2
[0047] The structure of the manipulator in an efficient working method of the intelligent manipulator described in this embodiment is the same as that in the first embodiment.
[0048] Such as figure 1 A highly efficient intelligent mechanical arm shown includes: a base 1, a column 2, a mechanical arm 3 and a control device 5, and the rotating mechanism 4 is composed of a rotating shaft, a lifting platform and a limit plate;
[0049] The relationship between the above components is as follows:
[0050] The column 2 is connected to the base 1 through the rotating mechanism 4, the rotating shaft is arranged in the mounting hole, the lifting table is arranged below the rotating shaft, the limiting plate is arranged on the base 1, and , which is matched with the rotating shaft; the mechanical arm 3 is connected with the column 2 through a connector, the control device 5 is arranged in the base 1, and the base 1, the column 2 and the mechanical arm 3 are all connected with the con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More