

Flexible bionic mechanical leg
A biomimetic mechanical and flexible technology, applied in the field of mechanical design, can solve the problems of simple structure, single function, unable to provide robot flexibility, etc., and achieve the effect of enhancing walking stability, preventing leg cramps, and enhancing flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The following will clearly and completely describe the technical solutions in the embodiments of the present invention. Obviously, the described embodiments are part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
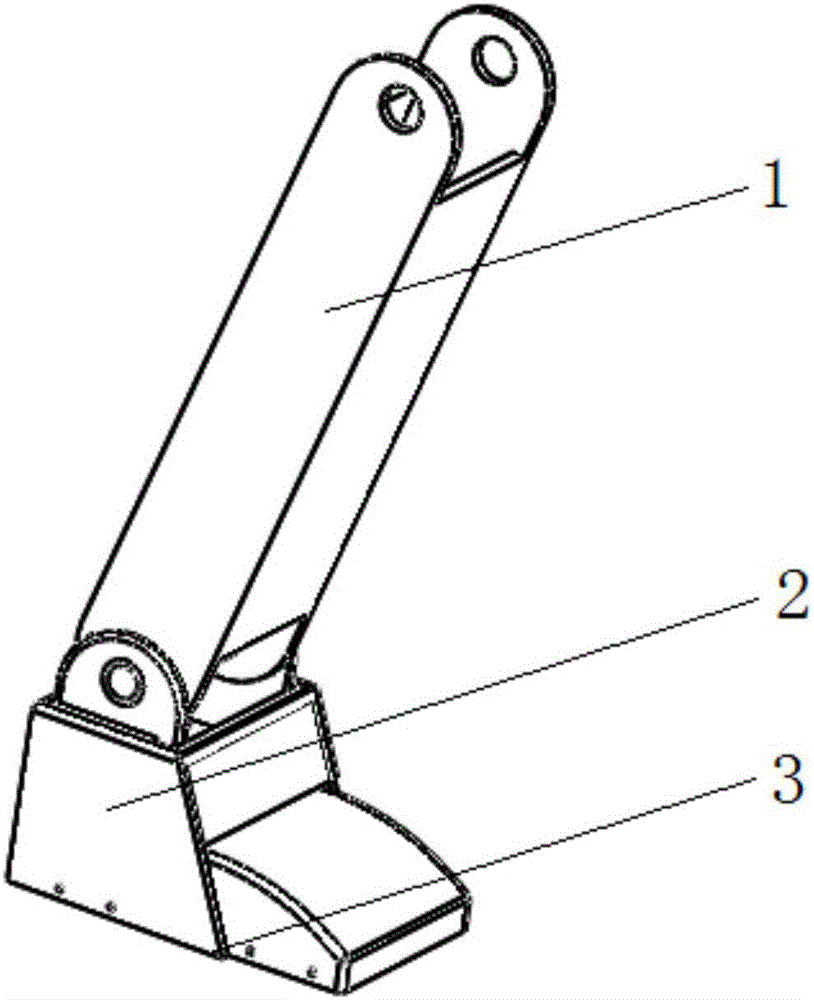
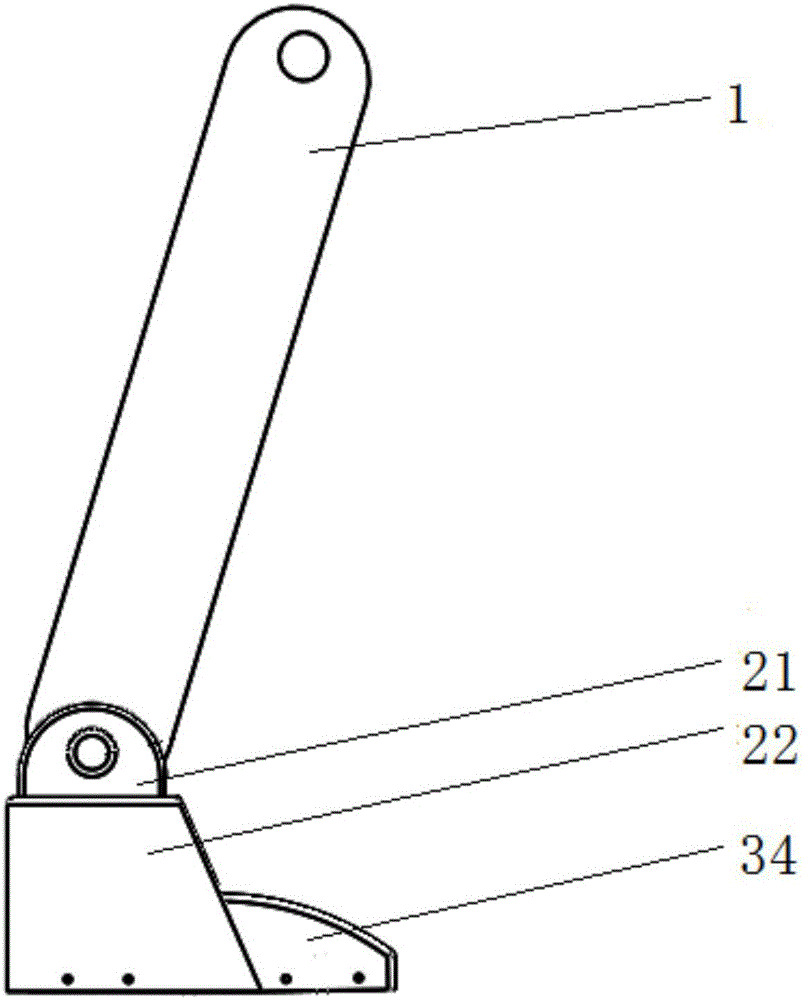
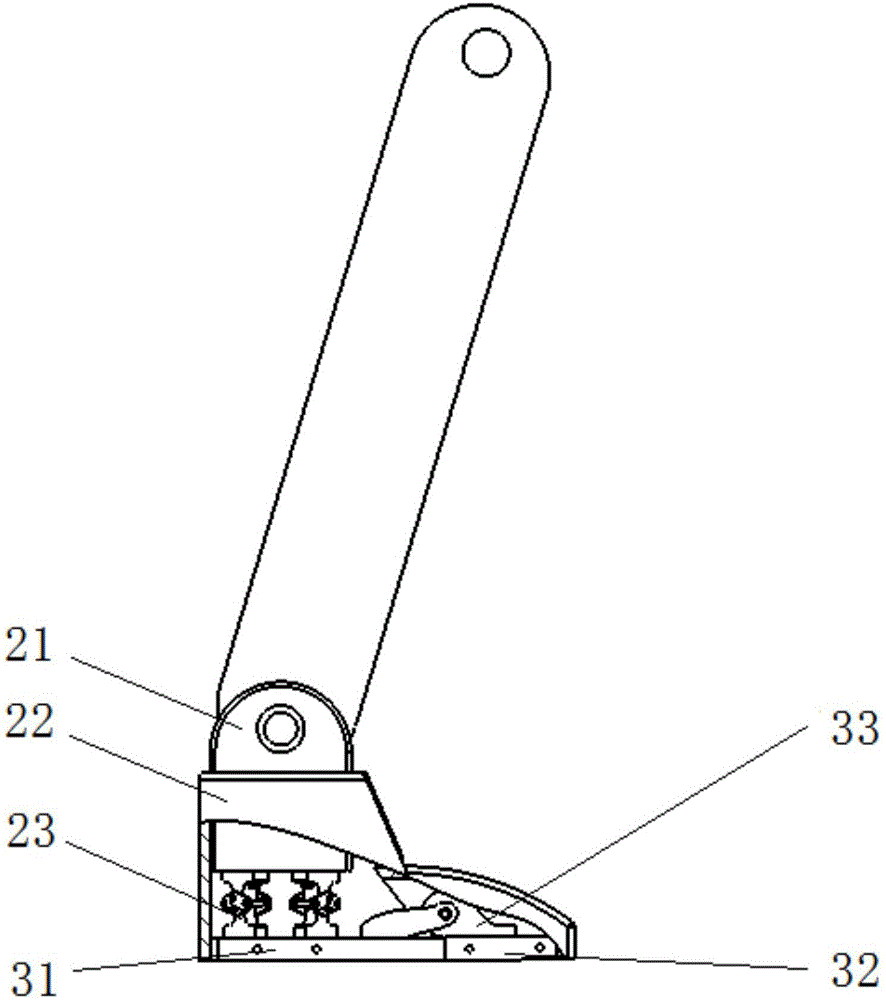
[0017] The invention provides a flexible bionic mechanical foot (abbreviated as mechanical foot, see Figure 1-6 ), comprising calf bar 1, ankle component 2 and sole component 3; described ankle component 2 comprises connecting upper plate 21, ankle shell 22 and at least one ankle elastic body 23; described sole component 3 comprises rear sole 31, front sole 32 , the front and rear feet connection frame 33 and the front feet protection shell 34; the two ends of the calf rod 1 have connection holes, the upper end is connect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More