

Accurate positioning method of monocular vision AGV based on multi-window real-time ranging
A monocular vision and precise positioning technology, applied in two-dimensional position/channel control, vehicle position/route/height control, instruments, etc., can solve the problems of low positioning accuracy, large amount of calculation, small field of view, etc., and achieve parking Accurate and stable positioning, high path measurement accuracy, and good real-time performance of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention provides a monocular visual AGV precise positioning method and system based on multi-window real-time ranging. In order to make the purpose of the present invention, technical solutions and effects clearer and clearer, the present invention is further described in detail with reference to the accompanying drawings and examples. It should be understood that the specific implementations described here are only used to explain the present invention, not to limit the present invention.
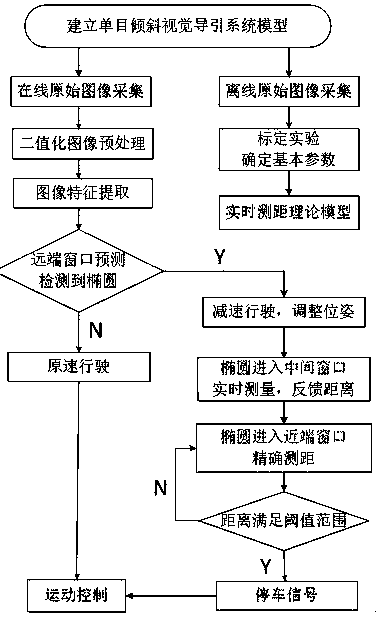
[0050] figure 1 A precise positioning method and system flow chart of a monocular vision-guided AGV based on multi-window real-time ranging provided by the present invention.
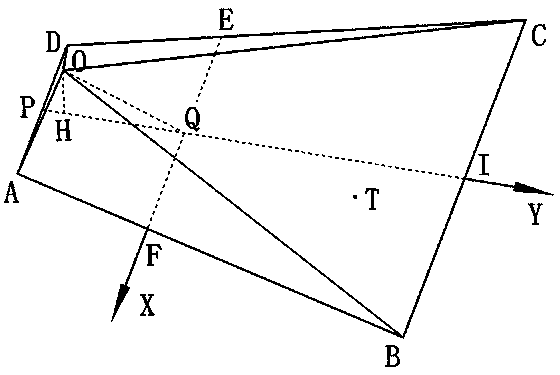
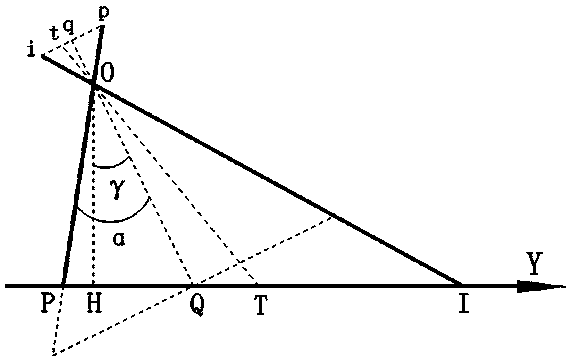
[0051] 1) Vision system model: use a low-cost vehicle-mounted camera, install it with a front tilt, simplify the monocular vision system model, and use geometric methods to derive the conversion relationship between the road surface coordinate system and the image plane coordinate system, and es...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More