

Vehicle Steering Controls
A technology of steering control and control device, which is applied in steering control, automatic steering control components, vehicle position/route/altitude control, etc., and can solve the problem that steering characteristics do not change rapidly.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
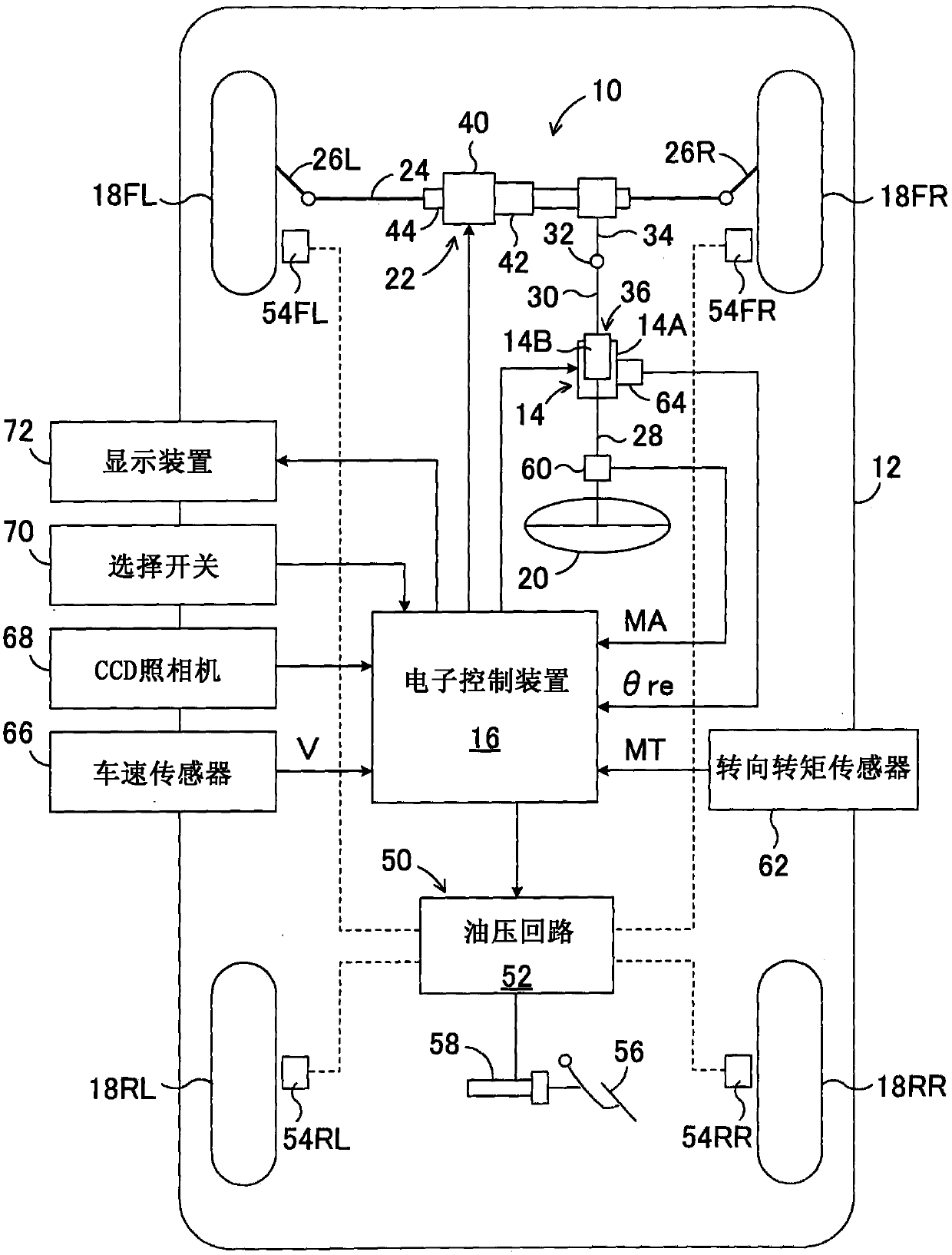
[0052] figure 1 A vehicle steering control device 10 according to a first embodiment of the present invention is shown installed in a vehicle 12 . The vehicle steering control device 10 includes a rudder angle variable device 14 and an electronic control device 16 that controls the rudder angle variable device 14, and the electronic control device 16 serves as the rudder angle control device of the present invention. The vehicle 12 includes a left front wheel 18FL and a right front wheel 18FR as steered wheels and a left rear wheel 18RL and a right rear wheel 18RR as non-steered wheels. The left front wheel 18FL and the right front wheel 18FR are turned by an electric power steering (EPS) 22 driven in response to a driver's operation of a steering wheel 20 through a rack 24 and links 26L and 26R.
[0053] The steering wheel 20 as a steering input device is linked to a gear shaft 34 in the electric power steering device 22 through an upper steering shaft 28 , a rudder angle va...
no. 2 example
[0158] Figure 20 is a main routine showing steering control including automatic steering control and termination control in the second embodiment, Figure 21 is a flowchart showing a subroutine for calculating the gain KIka for trajectory control in the second embodiment.
[0159] In this second embodiment, step 600 is based on Figure 21 The flow chart shown in , calculates the gain KIka for trajectory control. Other steps of this embodiment are performed as in the first embodiment described above.
[0160] as from Figure 21 and Figure 8 As understood from the comparison between, in this embodiment, the first gain K1 and the second gain K2 are not calculated, but step 650 starts from Figure 22 The map shown in calculates the modification amount ΔK3 based on the absolute value of the steering angular velocity MAd for calculating the gain KIka for trajectory control. In this case, the modification amount ΔK3 is a negative value, and is calculated to become larger as t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More