Single-wheel driven modular self-reconfiguration mobile robot
A mobile robot, modular technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of reduced module reliability, high power consumption, poor quick connection performance, etc., to reduce complexity and cost, reduce complexity speed and power consumption, the effect of reliable connection and disconnection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
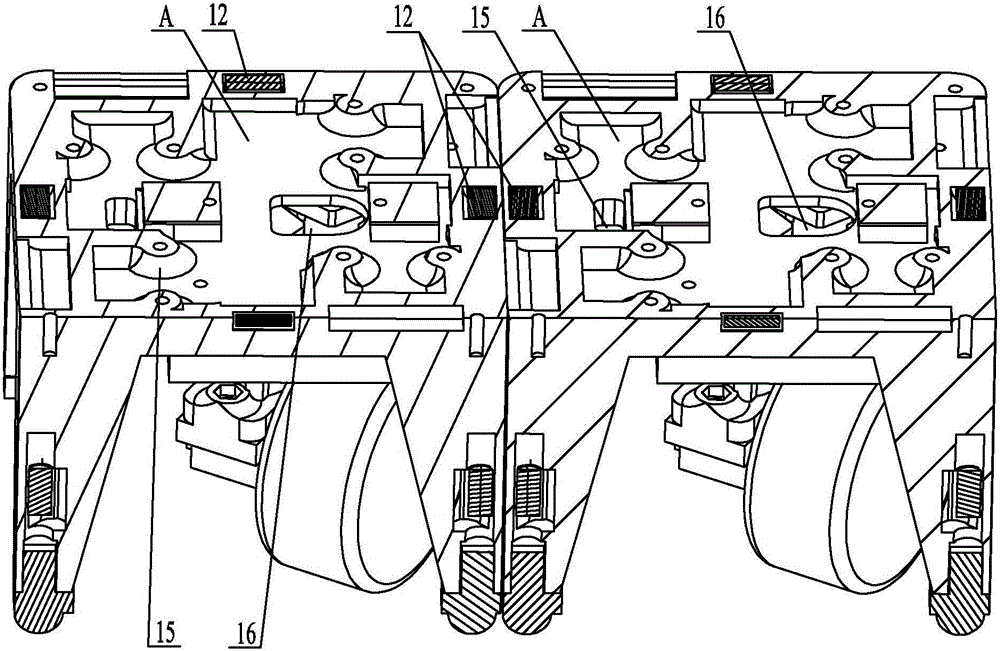
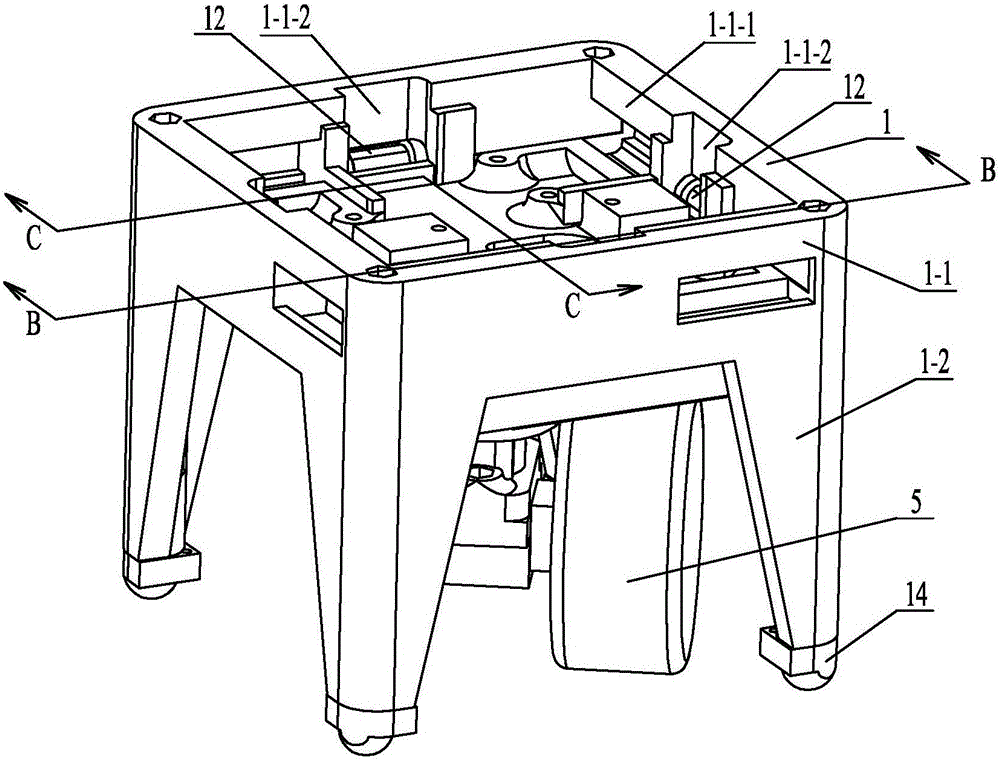
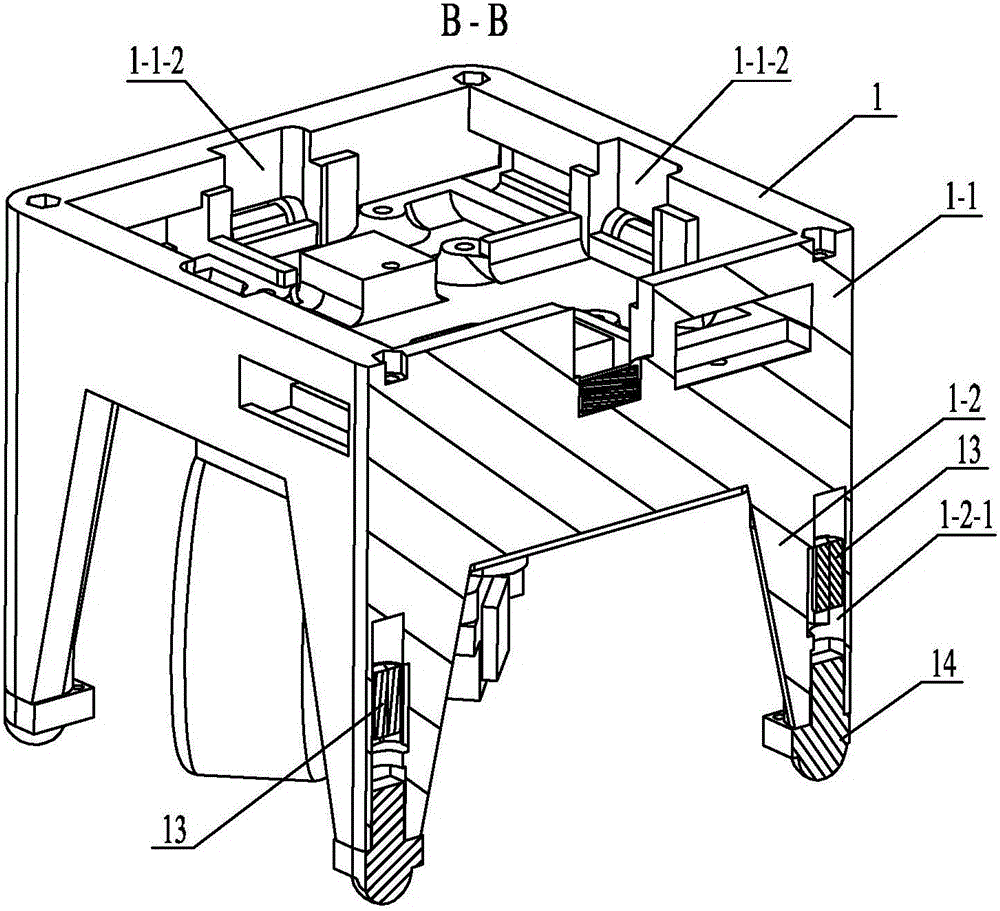
[0016] Specific implementation mode one: combine Figure 1 to Figure 6 Describe this embodiment, this embodiment includes at least two modules A, the two modules A are arranged side by side, each module A includes a housing 1, a motor base 2, a motor 3, a reducer 4, a driving wheel 5, a rotating shaft 6, Bearing 8, bearing seat plate 9, external gear 10, internal gear 11, two connecting elements 7, four radial magnets 12, four vertical magnets 13 and four legs 14, housing 1 includes module seat 1-1 and four supporting legs 1-2, the module seat 1-1 is a square box body, the upper end of the square box body is an open cavity 1-1-1, and the four supporting legs 1-2 are respectively located under the module seat 1-1 At the four corners, a groove 1-1-2 is provided in the middle of each side wall of the module seat 1-1, and a radial magnet 12 is embedded in each groove 1-1-2, and each leg 1 The lower end of -2 is provided with a vertical hole 1-2-1, a vertical magnet 13 is embedded...
specific Embodiment approach 2
[0017] Specific implementation mode two: combination Figure 1 ~ Figure 4 This embodiment will be described. The four legs 1-2 of this embodiment are integrated with the module base 1-1. This design makes the housing 1 more stable. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0018] Specific implementation mode three: combination Figure 4 and Figure 6 The present embodiment will be described. The external gear 10 of the present embodiment is transition-fitted with the rotating shaft 6 . Other compositions and connections are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com